
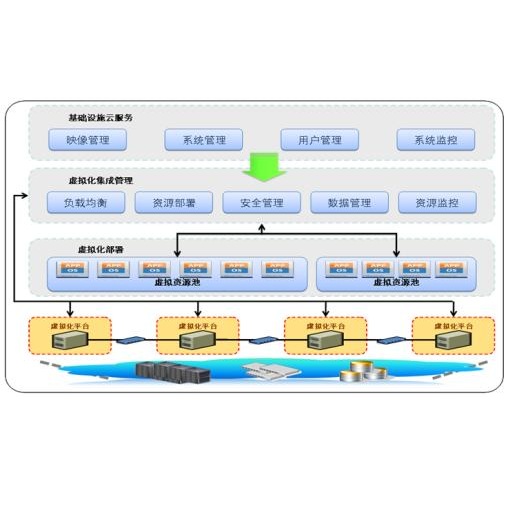

Cloud computing has transformed the way organizations manage and scale their IT infrastructure by offering flexible, scalable, and cost-effective solutions. However, the Infrastructure as a Service (IaaS) model faces performance challenges primarily due to the limitations imposed by virtualization technology. This paper focuses on designing an effective virtualization technique for IaaS, aiming to improve infrastructure-level performance. Through a systematic literature review and a design, development, and evaluation approach, various virtualization techniques such as full virtualization, paravirtualization, and hardware-assisted virtualization are explored. The study also considers the role of hypervisors like Xen, KVM, and VMware ESXi in improving performance. The proposed solution seeks to optimize resource utilization, minimize latency, and enhance overall throughput in IaaS environments. Finally, the research discusses the potential application of this virtualization technique for public cloud computing solutions tailored for Ethiopian Small and Medium Enterprises (ESMEs) using platforms like Amazon EC2.
相關內容
In most applications, robots need to adapt to new environments and be multi-functional without forgetting previous information. This requirement gains further importance in real-world scenarios where robots operate in coexistence with humans. In these complex environments, human actions inevitably lead to changes, requiring robots to adapt accordingly. To effectively address these dynamics, the concept of continual learning proves essential. It not only enables learning models to integrate new knowledge while preserving existing information but also facilitates the acquisition of insights from diverse contexts. This aspect is particularly relevant to the issue of context-switching, where robots must navigate and adapt to changing situational dynamics. Our approach introduces a novel approach to effectively tackle the problem of context drifts by designing a Streaming Graph Neural Network that incorporates both regularization and rehearsal techniques. Our Continual\_GTM model enables us to retain previous knowledge from different contexts, and it is more effective than traditional fine-tuning approaches. We evaluated the efficacy of Continual\_GTM in predicting human routines within household environments, leveraging spatio-temporal object dynamics across diverse scenarios.
Algorithms that use derivatives of governing equations have accelerated rigid robot simulations and improved their accuracy, enabling the modeling of complex, real-world capabilities. However, extending these methods to soft and hybrid soft-rigid robots is significantly more challenging due to the complexities in modeling continuous deformations inherent in soft bodies. A considerable number of soft robots and the deformable links of hybrid robots can be effectively modeled as slender rods. The Geometric Variable Strain (GVS) model, which employs the screw theory and the strain parameterization of the Cosserat rod, extends the rod theory to model hybrid soft-rigid robots within the same mathematical framework. Using the Recursive Newton-Euler Algorithm, we developed the analytical derivatives of the governing equations of the GVS model. These derivatives facilitate the implicit integration of dynamics and provide the analytical Jacobian of the statics residue, ensuring fast and accurate computations. We applied these derivatives to the mechanical simulations of six common robotic systems: a soft cable-driven manipulator, a hybrid serial robot, a fin-ray finger, a hybrid parallel robot, a contact scenario, and an underwater hybrid mobile robot. Simulation results demonstrate substantial improvements in computational efficiency, with speed-ups of up to three orders of magnitude. We validate the model by comparing simulations done with and without analytical derivatives. Beyond static and dynamic simulations, the techniques discussed in this paper hold the potential to revolutionize the analysis, control, and optimization of hybrid robotic systems for real-world applications.
We present a computational formulation for the approximate version of several variational inequality problems, investigating their computational complexity and establishing PPAD-completeness. Examining applications in computational game theory, we specifically focus on two key concepts: resilient Nash equilibrium, and multi-leader-follower games -- domains traditionally known for the absence of general solutions. In the presence of standard assumptions and relaxation techniques, we formulate problem versions for such games that are expressible in terms of variational inequalities, ultimately leading to proofs of PPAD-completeness.
In the context of visual navigation in unknown scenes, both "exploration" and "exploitation" are equally crucial. Robots must first establish environmental cognition through exploration and then utilize the cognitive information to accomplish target searches. However, most existing methods for image-goal navigation prioritize target search over the generation of exploratory behavior. To address this, we propose the Navigation with Uncertainty-driven Exploration (NUE) pipeline, which uses an implicit and compact scene representation, NeRF, as a cognitive structure. We estimate the uncertainty of NeRF and augment the exploratory ability by the uncertainty to in turn facilitate the construction of implicit representation. Simultaneously, we extract memory information from NeRF to enhance the robot's reasoning ability for determining the location of the target. Ultimately, we seamlessly combine the two generated abilities to produce navigational actions. Our pipeline is end-to-end, with the environmental cognitive structure being constructed online. Extensive experimental results on image-goal navigation demonstrate the capability of our pipeline to enhance exploratory behaviors, while also enabling a natural transition from the exploration to exploitation phase. This enables our model to outperform existing memory-based cognitive navigation structures in terms of navigation performance.
The high-performance computing (HPC) community has recently seen a substantial diversification of hardware platforms and their associated programming models. From traditional multicore processors to highly specialized accelerators, vendors and tool developers back up the relentless progress of those architectures. In the context of scientific programming, it is fundamental to consider performance portability frameworks, i.e., software tools that allow programmers to write code once and run it on different computer architectures without sacrificing performance. We report here on the benefits and challenges of performance portability using a field-line tracing simulation and a particle-in-cell code, two relevant applications in computational plasma physics with applications to magnetically-confined nuclear-fusion energy research. For these applications we report performance results obtained on four HPC platforms with server-class CPUs from Intel (Xeon) and AMD (EPYC), and high-end GPUs from Nvidia and AMD, including the latest Nvidia H100 GPU and the novel AMD Instinct MI300A APU. Our results show that both Kokkos and OpenMP are powerful tools to achieve performance portability and decent "out-of-the-box" performance, even for the very latest hardware platforms. For our applications, Kokkos provided performance portability to the broadest range of hardware architectures from different vendors.
Intelligent transportation systems play a crucial role in modern traffic management and optimization, greatly improving traffic efficiency and safety. With the rapid development of generative artificial intelligence (Generative AI) technologies in the fields of image generation and natural language processing, generative AI has also played a crucial role in addressing key issues in intelligent transportation systems, such as data sparsity, difficulty in observing abnormal scenarios, and in modeling data uncertainty. In this review, we systematically investigate the relevant literature on generative AI techniques in addressing key issues in different types of tasks in intelligent transportation systems. First, we introduce the principles of different generative AI techniques, and their potential applications. Then, we classify tasks in intelligent transportation systems into four types: traffic perception, traffic prediction, traffic simulation, and traffic decision-making. We systematically illustrate how generative AI techniques addresses key issues in these four different types of tasks. Finally, we summarize the challenges faced in applying generative AI to intelligent transportation systems, and discuss future research directions based on different application scenarios.
The fusion of causal models with deep learning introducing increasingly intricate data sets, such as the causal associations within images or between textual components, has surfaced as a focal research area. Nonetheless, the broadening of original causal concepts and theories to such complex, non-statistical data has been met with serious challenges. In response, our study proposes redefinitions of causal data into three distinct categories from the standpoint of causal structure and representation: definite data, semi-definite data, and indefinite data. Definite data chiefly pertains to statistical data used in conventional causal scenarios, while semi-definite data refers to a spectrum of data formats germane to deep learning, including time-series, images, text, and others. Indefinite data is an emergent research sphere inferred from the progression of data forms by us. To comprehensively present these three data paradigms, we elaborate on their formal definitions, differences manifested in datasets, resolution pathways, and development of research. We summarize key tasks and achievements pertaining to definite and semi-definite data from myriad research undertakings, present a roadmap for indefinite data, beginning with its current research conundrums. Lastly, we classify and scrutinize the key datasets presently utilized within these three paradigms.
In pace with developments in the research field of artificial intelligence, knowledge graphs (KGs) have attracted a surge of interest from both academia and industry. As a representation of semantic relations between entities, KGs have proven to be particularly relevant for natural language processing (NLP), experiencing a rapid spread and wide adoption within recent years. Given the increasing amount of research work in this area, several KG-related approaches have been surveyed in the NLP research community. However, a comprehensive study that categorizes established topics and reviews the maturity of individual research streams remains absent to this day. Contributing to closing this gap, we systematically analyzed 507 papers from the literature on KGs in NLP. Our survey encompasses a multifaceted review of tasks, research types, and contributions. As a result, we present a structured overview of the research landscape, provide a taxonomy of tasks, summarize our findings, and highlight directions for future work.
Deep neural networks have revolutionized many machine learning tasks in power systems, ranging from pattern recognition to signal processing. The data in these tasks is typically represented in Euclidean domains. Nevertheless, there is an increasing number of applications in power systems, where data are collected from non-Euclidean domains and represented as the graph-structured data with high dimensional features and interdependency among nodes. The complexity of graph-structured data has brought significant challenges to the existing deep neural networks defined in Euclidean domains. Recently, many studies on extending deep neural networks for graph-structured data in power systems have emerged. In this paper, a comprehensive overview of graph neural networks (GNNs) in power systems is proposed. Specifically, several classical paradigms of GNNs structures (e.g., graph convolutional networks, graph recurrent neural networks, graph attention networks, graph generative networks, spatial-temporal graph convolutional networks, and hybrid forms of GNNs) are summarized, and key applications in power systems such as fault diagnosis, power prediction, power flow calculation, and data generation are reviewed in detail. Furthermore, main issues and some research trends about the applications of GNNs in power systems are discussed.
Neural machine translation (NMT) is a deep learning based approach for machine translation, which yields the state-of-the-art translation performance in scenarios where large-scale parallel corpora are available. Although the high-quality and domain-specific translation is crucial in the real world, domain-specific corpora are usually scarce or nonexistent, and thus vanilla NMT performs poorly in such scenarios. Domain adaptation that leverages both out-of-domain parallel corpora as well as monolingual corpora for in-domain translation, is very important for domain-specific translation. In this paper, we give a comprehensive survey of the state-of-the-art domain adaptation techniques for NMT.
小貼士
登錄享
相關主題



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191