

Personalized prediction is a machine learning approach that predicts a person's future observations based on their past labeled observations and is typically used for sequential tasks, e.g., to predict daily mood ratings. When making personalized predictions, a model can combine two types of trends: (a) trends shared across people, i.e., person-generic trends, such as being happier on weekends, and (b) unique trends for each person, i.e., person-specific trends, such as a stressful weekly meeting. Mixed effect models are popular statistical models to study both trends by combining person-generic and person-specific parameters. Though linear mixed effect models are gaining popularity in machine learning by integrating them with neural networks, these integrations are currently limited to linear person-specific parameters: ruling out nonlinear person-specific trends. In this paper, we propose Neural Mixed Effect (NME) models to optimize nonlinear person-specific parameters anywhere in a neural network in a scalable manner. NME combines the efficiency of neural network optimization with nonlinear mixed effects modeling. Empirically, we observe that NME improves performance across six unimodal and multimodal datasets, including a smartphone dataset to predict daily mood and a mother-adolescent dataset to predict affective state sequences where half the mothers experience at least moderate symptoms of depression. Furthermore, we evaluate NME for two model architectures, including for neural conditional random fields (CRF) to predict affective state sequences where the CRF learns nonlinear person-specific temporal transitions between affective states. Analysis of these person-specific transitions on the mother-adolescent dataset shows interpretable trends related to the mother's depression symptoms.
相關內容
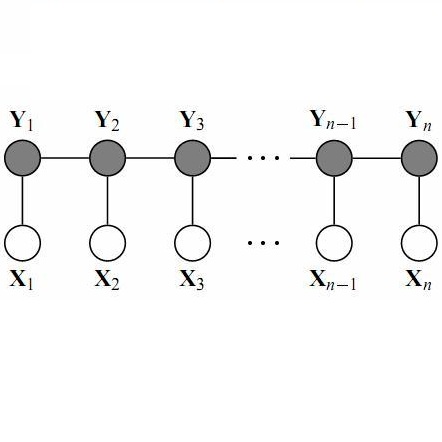
條件隨機域(場)(conditional random fields,簡稱 CRF,或CRFs),是一種判別式概率模型,是隨機場的一種,常用于標注或分析序列資料,如自然語言文字或是生物序列。
如同馬爾可夫隨機場,條件隨機場為具有無向的圖模型,圖中的頂點代表隨機變量,頂點間的連線代表隨機變量間的相依關系,在條件隨機場中,隨機變量 Y 的分布為條件機率,給定的觀察值則為隨機變量 X。原則上,條件隨機場的圖模型布局是可以任意給定的,一般常用的布局是鏈結式的架構,鏈結式架構不論在訓練(training)、推論(inference)、或是解碼(decoding)上,都存在效率較高的算法可供演算。
While it is generally acknowledged that force feedback is beneficial to robotic control, applications of policy learning to robotic manipulation typically only leverage visual feedback. Recently, symmetric neural models have been used to significantly improve the sample efficiency and performance of policy learning across a variety of robotic manipulation domains. This paper explores an application of symmetric policy learning to visual-force problems. We present Symmetric Visual Force Learning (SVFL), a novel method for robotic control which leverages visual and force feedback. We demonstrate that SVFL can significantly outperform state of the art baselines for visual force learning and report several interesting empirical findings related to the utility of learning force feedback control policies in both general manipulation tasks and scenarios with low visual acuity.
The rehearsal strategy is widely used to alleviate the catastrophic forgetting problem in class incremental learning (CIL) by preserving limited exemplars from previous tasks. With imbalanced sample numbers between old and new classes, the classifier learning can be biased. Existing CIL methods exploit the long-tailed (LT) recognition techniques, e.g., the adjusted losses and the data re-sampling methods, to handle the data imbalance issue within each increment task. In this work, the dynamic nature of data imbalance in CIL is shown and a novel Dynamic Residual Classifier (DRC) is proposed to handle this challenging scenario. Specifically, DRC is built upon a recent advance residual classifier with the branch layer merging to handle the model-growing problem. Moreover, DRC is compatible with different CIL pipelines and substantially improves them. Combining DRC with the model adaptation and fusion (MAF) pipeline, this method achieves state-of-the-art results on both the conventional CIL and the LT-CIL benchmarks. Extensive experiments are also conducted for a detailed analysis. The code is publicly available.
The future of automated driving (AD) is rooted in the development of robust, fair and explainable artificial intelligence methods. Upon request, automated vehicles must be able to explain their decisions to the driver and the car passengers, to the pedestrians and other vulnerable road users and potentially to external auditors in case of accidents. However, nowadays, most explainable methods still rely on quantitative analysis of the AD scene representations captured by multiple sensors. This paper proposes a novel representation of AD scenes, called Qualitative eXplainable Graph (QXG), dedicated to qualitative spatiotemporal reasoning of long-term scenes. The construction of this graph exploits the recent Qualitative Constraint Acquisition paradigm. Our experimental results on NuScenes, an open real-world multi-modal dataset, show that the qualitative eXplainable graph of an AD scene composed of 40 frames can be computed in real-time and light in space storage which makes it a potentially interesting tool for improved and more trustworthy perception and control processes in AD.
The adaptive processing of structured data is a long-standing research topic in machine learning that investigates how to automatically learn a mapping from a structured input to outputs of various nature. Recently, there has been an increasing interest in the adaptive processing of graphs, which led to the development of different neural network-based methodologies. In this thesis, we take a different route and develop a Bayesian Deep Learning framework for graph learning. The dissertation begins with a review of the principles over which most of the methods in the field are built, followed by a study on graph classification reproducibility issues. We then proceed to bridge the basic ideas of deep learning for graphs with the Bayesian world, by building our deep architectures in an incremental fashion. This framework allows us to consider graphs with discrete and continuous edge features, producing unsupervised embeddings rich enough to reach the state of the art on several classification tasks. Our approach is also amenable to a Bayesian nonparametric extension that automatizes the choice of almost all model's hyper-parameters. Two real-world applications demonstrate the efficacy of deep learning for graphs. The first concerns the prediction of information-theoretic quantities for molecular simulations with supervised neural models. After that, we exploit our Bayesian models to solve a malware-classification task while being robust to intra-procedural code obfuscation techniques. We conclude the dissertation with an attempt to blend the best of the neural and Bayesian worlds together. The resulting hybrid model is able to predict multimodal distributions conditioned on input graphs, with the consequent ability to model stochasticity and uncertainty better than most works. Overall, we aim to provide a Bayesian perspective into the articulated research field of deep learning for graphs.
Contrastive learning models have achieved great success in unsupervised visual representation learning, which maximize the similarities between feature representations of different views of the same image, while minimize the similarities between feature representations of views of different images. In text summarization, the output summary is a shorter form of the input document and they have similar meanings. In this paper, we propose a contrastive learning model for supervised abstractive text summarization, where we view a document, its gold summary and its model generated summaries as different views of the same mean representation and maximize the similarities between them during training. We improve over a strong sequence-to-sequence text generation model (i.e., BART) on three different summarization datasets. Human evaluation also shows that our model achieves better faithfulness ratings compared to its counterpart without contrastive objectives.
Recent contrastive representation learning methods rely on estimating mutual information (MI) between multiple views of an underlying context. E.g., we can derive multiple views of a given image by applying data augmentation, or we can split a sequence into views comprising the past and future of some step in the sequence. Contrastive lower bounds on MI are easy to optimize, but have a strong underestimation bias when estimating large amounts of MI. We propose decomposing the full MI estimation problem into a sum of smaller estimation problems by splitting one of the views into progressively more informed subviews and by applying the chain rule on MI between the decomposed views. This expression contains a sum of unconditional and conditional MI terms, each measuring modest chunks of the total MI, which facilitates approximation via contrastive bounds. To maximize the sum, we formulate a contrastive lower bound on the conditional MI which can be approximated efficiently. We refer to our general approach as Decomposed Estimation of Mutual Information (DEMI). We show that DEMI can capture a larger amount of MI than standard non-decomposed contrastive bounds in a synthetic setting, and learns better representations in a vision domain and for dialogue generation.
Embedding entities and relations into a continuous multi-dimensional vector space have become the dominant method for knowledge graph embedding in representation learning. However, most existing models ignore to represent hierarchical knowledge, such as the similarities and dissimilarities of entities in one domain. We proposed to learn a Domain Representations over existing knowledge graph embedding models, such that entities that have similar attributes are organized into the same domain. Such hierarchical knowledge of domains can give further evidence in link prediction. Experimental results show that domain embeddings give a significant improvement over the most recent state-of-art baseline knowledge graph embedding models.
Benefit from the quick development of deep learning techniques, salient object detection has achieved remarkable progresses recently. However, there still exists following two major challenges that hinder its application in embedded devices, low resolution output and heavy model weight. To this end, this paper presents an accurate yet compact deep network for efficient salient object detection. More specifically, given a coarse saliency prediction in the deepest layer, we first employ residual learning to learn side-output residual features for saliency refinement, which can be achieved with very limited convolutional parameters while keep accuracy. Secondly, we further propose reverse attention to guide such side-output residual learning in a top-down manner. By erasing the current predicted salient regions from side-output features, the network can eventually explore the missing object parts and details which results in high resolution and accuracy. Experiments on six benchmark datasets demonstrate that the proposed approach compares favorably against state-of-the-art methods, and with advantages in terms of simplicity, efficiency (45 FPS) and model size (81 MB).
Graph neural networks (GNNs) are a popular class of machine learning models whose major advantage is their ability to incorporate a sparse and discrete dependency structure between data points. Unfortunately, GNNs can only be used when such a graph-structure is available. In practice, however, real-world graphs are often noisy and incomplete or might not be available at all. With this work, we propose to jointly learn the graph structure and the parameters of graph convolutional networks (GCNs) by approximately solving a bilevel program that learns a discrete probability distribution on the edges of the graph. This allows one to apply GCNs not only in scenarios where the given graph is incomplete or corrupted but also in those where a graph is not available. We conduct a series of experiments that analyze the behavior of the proposed method and demonstrate that it outperforms related methods by a significant margin.
Deep learning has yielded state-of-the-art performance on many natural language processing tasks including named entity recognition (NER). However, this typically requires large amounts of labeled data. In this work, we demonstrate that the amount of labeled training data can be drastically reduced when deep learning is combined with active learning. While active learning is sample-efficient, it can be computationally expensive since it requires iterative retraining. To speed this up, we introduce a lightweight architecture for NER, viz., the CNN-CNN-LSTM model consisting of convolutional character and word encoders and a long short term memory (LSTM) tag decoder. The model achieves nearly state-of-the-art performance on standard datasets for the task while being computationally much more efficient than best performing models. We carry out incremental active learning, during the training process, and are able to nearly match state-of-the-art performance with just 25\% of the original training data.
小貼士
登錄享




注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191