
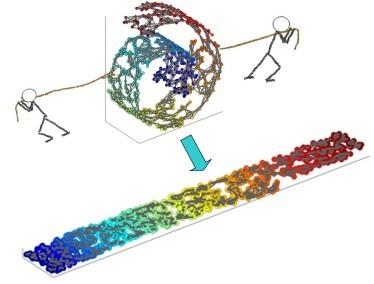

Based on the Riemannian manifold model, we study the asymptotic behavior of a widely applied unsupervised learning algorithm, locally linear embedding (LLE), when the point cloud is sampled from a compact, smooth manifold with boundary. We show several peculiar behaviors of LLE near the boundary that are different from those diffusion-based algorithms. In particular, we show that LLE pointwisely converges to a mixed-type differential operator with degeneracy and we calculate the convergence rate. The impact of the hyperbolic part of the operator is discussed and we propose a clipped LLE algorithm which is a potential approach to recover the Dirichlet Laplace-Beltrami operator.
相關內容
Contrastive learning models have achieved great success in unsupervised visual representation learning, which maximize the similarities between feature representations of different views of the same image, while minimize the similarities between feature representations of views of different images. In text summarization, the output summary is a shorter form of the input document and they have similar meanings. In this paper, we propose a contrastive learning model for supervised abstractive text summarization, where we view a document, its gold summary and its model generated summaries as different views of the same mean representation and maximize the similarities between them during training. We improve over a strong sequence-to-sequence text generation model (i.e., BART) on three different summarization datasets. Human evaluation also shows that our model achieves better faithfulness ratings compared to its counterpart without contrastive objectives.
Breakthroughs in machine learning in the last decade have led to `digital intelligence', i.e. machine learning models capable of learning from vast amounts of labeled data to perform several digital tasks such as speech recognition, face recognition, machine translation and so on. The goal of this thesis is to make progress towards designing algorithms capable of `physical intelligence', i.e. building intelligent autonomous navigation agents capable of learning to perform complex navigation tasks in the physical world involving visual perception, natural language understanding, reasoning, planning, and sequential decision making. Despite several advances in classical navigation methods in the last few decades, current navigation agents struggle at long-term semantic navigation tasks. In the first part of the thesis, we discuss our work on short-term navigation using end-to-end reinforcement learning to tackle challenges such as obstacle avoidance, semantic perception, language grounding, and reasoning. In the second part, we present a new class of navigation methods based on modular learning and structured explicit map representations, which leverage the strengths of both classical and end-to-end learning methods, to tackle long-term navigation tasks. We show that these methods are able to effectively tackle challenges such as localization, mapping, long-term planning, exploration and learning semantic priors. These modular learning methods are capable of long-term spatial and semantic understanding and achieve state-of-the-art results on various navigation tasks.
Recent contrastive representation learning methods rely on estimating mutual information (MI) between multiple views of an underlying context. E.g., we can derive multiple views of a given image by applying data augmentation, or we can split a sequence into views comprising the past and future of some step in the sequence. Contrastive lower bounds on MI are easy to optimize, but have a strong underestimation bias when estimating large amounts of MI. We propose decomposing the full MI estimation problem into a sum of smaller estimation problems by splitting one of the views into progressively more informed subviews and by applying the chain rule on MI between the decomposed views. This expression contains a sum of unconditional and conditional MI terms, each measuring modest chunks of the total MI, which facilitates approximation via contrastive bounds. To maximize the sum, we formulate a contrastive lower bound on the conditional MI which can be approximated efficiently. We refer to our general approach as Decomposed Estimation of Mutual Information (DEMI). We show that DEMI can capture a larger amount of MI than standard non-decomposed contrastive bounds in a synthetic setting, and learns better representations in a vision domain and for dialogue generation.
Recently, a considerable literature has grown up around the theme of Graph Convolutional Network (GCN). How to effectively leverage the rich structural information in complex graphs, such as knowledge graphs with heterogeneous types of entities and relations, is a primary open challenge in the field. Most GCN methods are either restricted to graphs with a homogeneous type of edges (e.g., citation links only), or focusing on representation learning for nodes only instead of jointly propagating and updating the embeddings of both nodes and edges for target-driven objectives. This paper addresses these limitations by proposing a novel framework, namely the Knowledge Embedding based Graph Convolutional Network (KE-GCN), which combines the power of GCNs in graph-based belief propagation and the strengths of advanced knowledge embedding (a.k.a. knowledge graph embedding) methods, and goes beyond. Our theoretical analysis shows that KE-GCN offers an elegant unification of several well-known GCN methods as specific cases, with a new perspective of graph convolution. Experimental results on benchmark datasets show the advantageous performance of KE-GCN over strong baseline methods in the tasks of knowledge graph alignment and entity classification.
Graph Neural Networks (GNN) is an emerging field for learning on non-Euclidean data. Recently, there has been increased interest in designing GNN that scales to large graphs. Most existing methods use "graph sampling" or "layer-wise sampling" techniques to reduce training time. However, these methods still suffer from degrading performance and scalability problems when applying to graphs with billions of edges. This paper presents GBP, a scalable GNN that utilizes a localized bidirectional propagation process from both the feature vectors and the training/testing nodes. Theoretical analysis shows that GBP is the first method that achieves sub-linear time complexity for both the precomputation and the training phases. An extensive empirical study demonstrates that GBP achieves state-of-the-art performance with significantly less training/testing time. Most notably, GBP can deliver superior performance on a graph with over 60 million nodes and 1.8 billion edges in less than half an hour on a single machine.
Deep learning methods for graphs achieve remarkable performance on many node-level and graph-level prediction tasks. However, despite the proliferation of the methods and their success, prevailing Graph Neural Networks (GNNs) neglect subgraphs, rendering subgraph prediction tasks challenging to tackle in many impactful applications. Further, subgraph prediction tasks present several unique challenges, because subgraphs can have non-trivial internal topology, but also carry a notion of position and external connectivity information relative to the underlying graph in which they exist. Here, we introduce SUB-GNN, a subgraph neural network to learn disentangled subgraph representations. In particular, we propose a novel subgraph routing mechanism that propagates neural messages between the subgraph's components and randomly sampled anchor patches from the underlying graph, yielding highly accurate subgraph representations. SUB-GNN specifies three channels, each designed to capture a distinct aspect of subgraph structure, and we provide empirical evidence that the channels encode their intended properties. We design a series of new synthetic and real-world subgraph datasets. Empirical results for subgraph classification on eight datasets show that SUB-GNN achieves considerable performance gains, outperforming strong baseline methods, including node-level and graph-level GNNs, by 12.4% over the strongest baseline. SUB-GNN performs exceptionally well on challenging biomedical datasets when subgraphs have complex topology and even comprise multiple disconnected components.
Graph Convolutional Networks (GCNs) have recently become the primary choice for learning from graph-structured data, superseding hash fingerprints in representing chemical compounds. However, GCNs lack the ability to take into account the ordering of node neighbors, even when there is a geometric interpretation of the graph vertices that provides an order based on their spatial positions. To remedy this issue, we propose Geometric Graph Convolutional Network (geo-GCN) which uses spatial features to efficiently learn from graphs that can be naturally located in space. Our contribution is threefold: we propose a GCN-inspired architecture which (i) leverages node positions, (ii) is a proper generalisation of both GCNs and Convolutional Neural Networks (CNNs), (iii) benefits from augmentation which further improves the performance and assures invariance with respect to the desired properties. Empirically, geo-GCN outperforms state-of-the-art graph-based methods on image classification and chemical tasks.
We introduce an approach for deep reinforcement learning (RL) that improves upon the efficiency, generalization capacity, and interpretability of conventional approaches through structured perception and relational reasoning. It uses self-attention to iteratively reason about the relations between entities in a scene and to guide a model-free policy. Our results show that in a novel navigation and planning task called Box-World, our agent finds interpretable solutions that improve upon baselines in terms of sample complexity, ability to generalize to more complex scenes than experienced during training, and overall performance. In the StarCraft II Learning Environment, our agent achieves state-of-the-art performance on six mini-games -- surpassing human grandmaster performance on four. By considering architectural inductive biases, our work opens new directions for overcoming important, but stubborn, challenges in deep RL.
Attention networks in multimodal learning provide an efficient way to utilize given visual information selectively. However, the computational cost to learn attention distributions for every pair of multimodal input channels is prohibitively expensive. To solve this problem, co-attention builds two separate attention distributions for each modality neglecting the interaction between multimodal inputs. In this paper, we propose bilinear attention networks (BAN) that find bilinear attention distributions to utilize given vision-language information seamlessly. BAN considers bilinear interactions among two groups of input channels, while low-rank bilinear pooling extracts the joint representations for each pair of channels. Furthermore, we propose a variant of multimodal residual networks to exploit eight-attention maps of the BAN efficiently. We quantitatively and qualitatively evaluate our model on visual question answering (VQA 2.0) and Flickr30k Entities datasets, showing that BAN significantly outperforms previous methods and achieves new state-of-the-arts on both datasets.
We investigate a lattice-structured LSTM model for Chinese NER, which encodes a sequence of input characters as well as all potential words that match a lexicon. Compared with character-based methods, our model explicitly leverages word and word sequence information. Compared with word-based methods, lattice LSTM does not suffer from segmentation errors. Gated recurrent cells allow our model to choose the most relevant characters and words from a sentence for better NER results. Experiments on various datasets show that lattice LSTM outperforms both word-based and character-based LSTM baselines, achieving the best results.

注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191