

Nowadays, botnets have become one of the major threats to cyber security. The characteristics of botnets are mainly reflected in bots network behavior and their intercommunication relationships. Existing botnet detection methods use flow features or topology features individually, which overlook the other type of feature. This affects model performance. In this paper, we propose a botnet detection model which uses graph convolutional network (GCN) to deeply fuse flow features and topology features for the first time. We construct communication graphs from network traffic and represent nodes with flow features. Due to the imbalance of existing public traffic flow datasets, it is impossible to train a GCN model on these datasets. Therefore, we use a balanced public communication graph dataset to pretrain a GCN model, thereby guaranteeing its capacity for identify topology features. We then feed the communication graph with flow features into the pretrained GCN. The output from the last hidden layer is treated as the fusion of flow and topology features. Additionally, by adjusting the number of layers in the GCN network, the model can effectively detect botnets under both C2 and P2P structures. Validated on the public ISCX2014 dataset, our approach achieves a remarkable recall rate 92.90% and F1-score 92.76% for C2 botnets, alongside recall rate 94.66% and F1-score of 92.35% for P2P botnets. These results not only demonstrate the effectiveness of our method, but also outperform the performance of the currently leading detection models.
相關內容
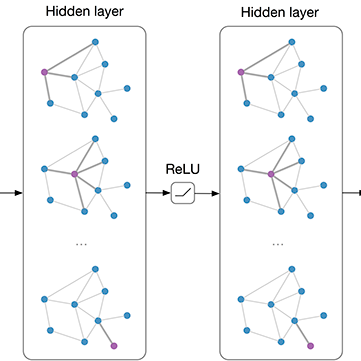
圖卷積(ji)網絡(簡稱GCN),由Thomas Kpif于(yu)2017年(nian)在論(lun)文Semi-supervised classification with graph convolutional networks中(zhong)提(ti)出。它為圖(graph)結構數據(ju)的(de)處理(li)提(ti)供(gong)了一個嶄新(xin)的(de)思路,將深度學習中(zhong)常用于(yu)圖像的(de)卷積(ji)神(shen)經網絡應用到圖數據(ju)上。
Biological nervous systems constitute important sources of inspiration towards computers that are faster, cheaper, and more energy efficient. Neuromorphic disciplines view the brain as a coevolved system, simultaneously optimizing the hardware and the algorithms running on it. There are clear efficiency gains when bringing the computations into a physical substrate, but we presently lack theories to guide efficient implementations. Here, we present a principled computational model for neuromorphic systems in terms of spatio-temporal receptive fields, based on affine Gaussian kernels over space and leaky-integrator and leaky integrate-and-fire models over time. Our theory is provably covariant to spatial affine and temporal scaling transformations, and with close similarities to the visual processing in mammalian brains. We use these spatio-temporal receptive fields as a prior in an event-based vision task, and show that this improves the training of spiking networks, which otherwise is known as problematic for event-based vision. This work combines efforts within scale-space theory and computational neuroscience to identify theoretically well-founded ways to process spatio-temporal signals in neuromorphic systems. Our contributions are immediately relevant for signal processing and event-based vision, and can be extended to other processing tasks over space and time, such as memory and control.
In the wake of the global spread of monkeypox, accurate disease recognition has become crucial. This study introduces an improved SE-InceptionV3 model, embedding the SENet module and incorporating L2 regularization into the InceptionV3 framework to enhance monkeypox disease detection. Utilizing the Kaggle monkeypox dataset, which includes images of monkeypox and similar skin conditions, our model demonstrates a noteworthy accuracy of 96.71% on the test set, outperforming conventional methods and deep learning models. The SENet modules channel attention mechanism significantly elevates feature representation, while L2 regularization ensures robust generalization. Extensive experiments validate the models superiority in precision, recall, and F1 score, highlighting its effectiveness in differentiating monkeypox lesions in diverse and complex cases. The study not only provides insights into the application of advanced CNN architectures in medical diagnostics but also opens avenues for further research in model optimization and hyperparameter tuning for enhanced disease recognition. //github.com/jzc777/SE-inceptionV3-L2
In this article, we consider designs of simple analog artificial neural networks based on adiabatic Josephson cells with a sigmoid activation function. A new approach based on the gradient descent method is developed to adjust the circuit parameters, allowing efficient signal transmission between the network layers. The proposed solution is demonstrated on the example of the system implementing XOR and OR logical operations.
The unique solvability and error analysis of the original Lagrange multiplier approach proposed in [8] for gradient flows is studied in this paper. We identify a necessary and sufficient condition that must be satisfied for the nonlinear algebraic equation arising from the original Lagrange multiplier approach to admit a unique solution in the neighborhood of its exact solution, and propose a modified Lagrange multiplier approach so that the computation can continue even if the aforementioned condition is not satisfied. Using Cahn-Hilliard equation as an example, we prove rigorously the unique solvability and establish optimal error estimates of a second-order Lagrange multiplier scheme assuming this condition and that the time step is sufficient small. We also present numerical results to demonstrate that the modified Lagrange multiplier approach is much more robust and can use much larger time step than the original Lagrange multiplier approach.
Scalar auxiliary variable (SAV) methods are a class of linear schemes for solving gradient flows that are known for the stability of a `modified' energy. In this paper, we propose an improved SAV (iSAV) scheme that not only retains the complete linearity but also ensures rigorously the stability of the original energy. The convergence and optimal error bound are rigorously established for the iSAV scheme and discussions are made for its high-order extension. Extensive numerical experiments are done to validate the convergence, robustness and energy stability of iSAV, and some comparisons are made.
We study the properties of a family of distances between functions of a single variable. These distances are examples of integral probability metrics, and have been used previously for comparing probability measures on the line; special cases include the Earth Mover's Distance and the Kolmogorov Metric. We examine their properties for general signals, proving that they are robust to a broad class of deformations. We also establish corresponding robustness results for the induced sliced distances between multivariate functions. Finally, we establish error bounds for approximating the univariate metrics from finite samples, and prove that these approximations are robust to additive Gaussian noise. The results are illustrated in numerical experiments, which include comparisons with Wasserstein distances.
The evaluation of text-generative vision-language models is a challenging yet crucial endeavor. By addressing the limitations of existing Visual Question Answering (VQA) benchmarks and proposing innovative evaluation methodologies, our research seeks to advance our understanding of these models' capabilities. We propose a novel VQA benchmark based on well-known visual classification datasets which allows a granular evaluation of text-generative vision-language models and their comparison with discriminative vision-language models. To improve the assessment of coarse answers on fine-grained classification tasks, we suggest using the semantic hierarchy of the label space to ask automatically generated follow-up questions about the ground-truth category. Finally, we compare traditional NLP and LLM-based metrics for the problem of evaluating model predictions given ground-truth answers. We perform a human evaluation study upon which we base our decision on the final metric. We apply our benchmark to a suite of vision-language models and show a detailed comparison of their abilities on object, action, and attribute classification. Our contributions aim to lay the foundation for more precise and meaningful assessments, facilitating targeted progress in the exciting field of vision-language modeling.
The emerging behaviors of swarms have fascinated scientists and gathered significant interest in the field of robotics. Traditionally, swarms are viewed as egalitarian, with robots sharing identical roles and capabilities. However, recent findings highlight the importance of hierarchy for deploying robot swarms more effectively in diverse scenarios. Despite nature's preference for hierarchies, the robotics field has clung to the egalitarian model, partly due to a lack of empirical evidence for the conditions favoring hierarchies. Our research demonstrates that while egalitarian swarms excel in environments proportionate to their collective sensing abilities, they struggle in larger or more complex settings. Hierarchical swarms, conversely, extend their sensing reach efficiently, proving successful in larger, more unstructured environments with fewer resources. We validated these concepts through simulations and physical robot experiments, using a complex radiation cleanup task. This study paves the way for developing adaptable, hierarchical swarm systems applicable in areas like planetary exploration and autonomous vehicles. Moreover, these insights could deepen our understanding of hierarchical structures in biological organisms.
Generalization to unseen data is a key desideratum for deep networks, but its relation to classification accuracy is unclear. Using a minimalist vision dataset and a measure of generalizability, we show that popular networks, from deep convolutional networks (CNNs) to transformers, vary in their power to extrapolate to unseen classes both across layers and across architectures. Accuracy is not a good predictor of generalizability, and generalization varies non-monotonically with layer depth.
Designing protein nanomaterials of predefined shape and characteristics has the potential to dramatically impact the medical industry. Machine learning (ML) has proven successful in protein design, reducing the need for expensive wet lab experiment rounds. However, challenges persist in efficiently exploring the protein fitness landscapes to identify optimal protein designs. In response, we propose the use of AlphaZero to generate protein backbones, meeting shape and structural scoring requirements. We extend an existing Monte Carlo tree search (MCTS) framework by incorporating a novel threshold-based reward and secondary objectives to improve design precision. This innovation considerably outperforms existing approaches, leading to protein backbones that better respect structural scores. The application of AlphaZero is novel in the context of protein backbone design and demonstrates promising performance. AlphaZero consistently surpasses baseline MCTS by more than 100% in top-down protein design tasks. Additionally, our application of AlphaZero with secondary objectives uncovers further promising outcomes, indicating the potential of model-based reinforcement learning (RL) in navigating the intricate and nuanced aspects of protein design
小貼士
登錄享
相關主題




注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191