
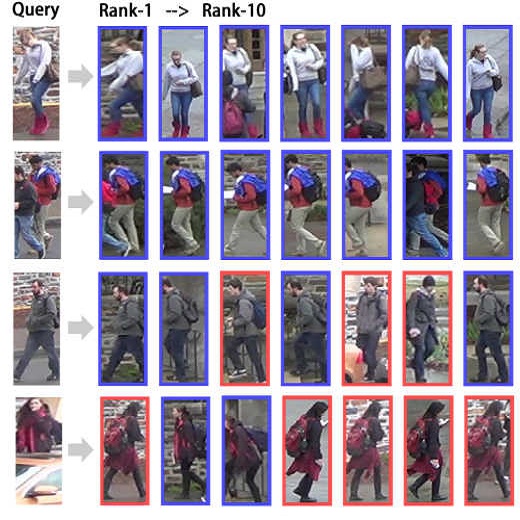
In this paper, we introduce a large Multi-Attribute and Language Search dataset for text-based person retrieval, called MALS, and explore the feasibility of performing pre-training on both attribute recognition and image-text matching tasks in one stone. In particular, MALS contains 1,510,330 image-text pairs, which is about 37.5 times larger than prevailing CUHK-PEDES, and all images are annotated with 27 attributes. Considering the privacy concerns and annotation costs, we leverage the off-the-shelf diffusion models to generate the dataset. To verify the feasibility of learning from the generated data, we develop a new joint Attribute Prompt Learning and Text Matching Learning (APTM) framework, considering the shared knowledge between attribute and text. As the name implies, APTM contains an attribute prompt learning stream and a text matching learning stream. (1) The attribute prompt learning leverages the attribute prompts for image-attribute alignment, which enhances the text matching learning. (2) The text matching learning facilitates the representation learning on fine-grained details, and in turn, boosts the attribute prompt learning. Extensive experiments validate the effectiveness of the pre-training on MALS, achieving state-of-the-art retrieval performance via APTM on three challenging real-world benchmarks. In particular, APTM achieves a consistent improvement of +6.96%, +7.68%, and +16.95% Recall@1 accuracy on CUHK-PEDES, ICFG-PEDES, and RSTPReid datasets by a clear margin, respectively.
相關內容

This paper develops a novel slip estimator using the invariant observer design theory and Disturbance Observer (DOB). The proposed state estimator for mobile robots is fully proprioceptive and combines data from an inertial measurement unit and body velocity within a Right Invariant Extended Kalman Filter (RI-EKF). By embedding the slip velocity into $\mathrm{SE}_3(3)$ matrix Lie group, the developed DOB-based RI-EKF provides real-time velocity and slip velocity estimates on different terrains. Experimental results using a Husky wheeled robot confirm the mathematical derivations and effectiveness of the proposed method in estimating the observable state variables. Open-source software is available for download and reproducing the presented results.
In this paper, we introduce SCALE, a collaborative framework that connects compact Specialized Translation Models (STMs) and general-purpose Large Language Models (LLMs) as one unified translation engine. By introducing translation from STM into the triplet in-context demonstrations, SCALE unlocks refinement and pivoting ability of LLM, thus mitigating language bias of LLM and parallel data bias of STM, enhancing LLM speciality without sacrificing generality, and facilitating continual learning without expensive LLM fine-tuning. Our comprehensive experiments show that SCALE significantly outperforms both few-shot LLMs (GPT-4) and specialized models (NLLB) in challenging low-resource settings. Moreover, in Xhosa to English translation, SCALE experiences consistent improvement by a 4 BLEURT score without tuning LLM and surpasses few-shot GPT-4 by 2.5 COMET score and 3.8 BLEURT score when equipped with a compact model consisting of merely 600M parameters. SCALE could also effectively exploit the existing language bias of LLMs by using an English-centric STM as a pivot for translation between any language pairs, outperforming few-shot GPT-4 by an average of 6 COMET points across eight translation directions. Furthermore we provide an in-depth analysis of SCALE's robustness, translation characteristics, and latency costs, providing solid foundation for future studies exploring the potential synergy between LLMs and more specialized, task-specific models.
In this paper, we propose a new method called Clustering Topological PRM (CTopPRM) for finding multiple homotopically distinct paths in 3D cluttered environments. Finding such distinct paths, e.g., going around an obstacle from a different side, is useful in many applications. Among others, using multiple distinct paths is necessary for optimization-based trajectory planners where found trajectories are restricted to only a single homotopy class of a given path. Distinct paths can also be used to guide sampling-based motion planning and thus increase the effectiveness of planning in environments with narrow passages. Graph-based representation called roadmap is a common representation for path planning and also for finding multiple distinct paths. However, challenging environments with multiple narrow passages require a densely sampled roadmap to capture the connectivity of the environment. Searching such a dense roadmap for multiple paths is computationally too expensive. Therefore, the majority of existing methods construct only a sparse roadmap which, however, struggles to find all distinct paths in challenging environments. To this end, we propose the CTopPRM which creates a sparse graph by clustering an initially sampled dense roadmap. Such a reduced roadmap allows fast identification of homotopically distinct paths captured in the dense roadmap. We show, that compared to the existing methods the CTopPRM improves the probability of finding all distinct paths by almost 20% in tested environments, during same run-time. The source code of our method is released as an open-source package.
This paper studies Large Language Models (LLMs) for structured data--particularly graphs--a crucial data modality that remains underexplored in the LLM literature. We aim to understand when and why the incorporation of structural information inherent in graph data can improve the prediction performance of LLMs on node classification tasks. To address the ``when'' question, we examine a variety of prompting methods for encoding structural information, in settings where textual node features are either rich or scarce. For the ``why'' questions, we probe into two potential contributing factors to the LLM performance: data leakage and homophily. Our exploration of these questions reveals that (i) LLMs can benefit from structural information, especially when textual node features are scarce; (ii) there is no substantial evidence indicating that the performance of LLMs is significantly attributed to data leakage; and (iii) the performance of LLMs on a target node is strongly positively related to the local homophily ratio of the node.
This paper presents NOMAD (Non-Matching Audio Distance), a differentiable perceptual similarity metric that measures the distance of a degraded signal against non-matching references. The proposed method is based on learning deep feature embeddings via a triplet loss guided by the Neurogram Similarity Index Measure (NSIM) to capture degradation intensity. During inference, the similarity score between any two audio samples is computed through Euclidean distance of their embeddings. NOMAD is fully unsupervised and can be used in general perceptual audio tasks for audio analysis e.g. quality assessment and generative tasks such as speech enhancement and speech synthesis. The proposed method is evaluated with 3 tasks. Ranking degradation intensity, predicting speech quality, and as a loss function for speech enhancement. Results indicate NOMAD outperforms other non-matching reference approaches in both ranking degradation intensity and quality assessment, exhibiting competitive performance with full-reference audio metrics. NOMAD demonstrates a promising technique that mimics human capabilities in assessing audio quality with non-matching references to learn perceptual embeddings without the need for human-generated labels.
In this paper, we propose a novel Feature Decomposition and Reconstruction Learning (FDRL) method for effective facial expression recognition. We view the expression information as the combination of the shared information (expression similarities) across different expressions and the unique information (expression-specific variations) for each expression. More specifically, FDRL mainly consists of two crucial networks: a Feature Decomposition Network (FDN) and a Feature Reconstruction Network (FRN). In particular, FDN first decomposes the basic features extracted from a backbone network into a set of facial action-aware latent features to model expression similarities. Then, FRN captures the intra-feature and inter-feature relationships for latent features to characterize expression-specific variations, and reconstructs the expression feature. To this end, two modules including an intra-feature relation modeling module and an inter-feature relation modeling module are developed in FRN. Experimental results on both the in-the-lab databases (including CK+, MMI, and Oulu-CASIA) and the in-the-wild databases (including RAF-DB and SFEW) show that the proposed FDRL method consistently achieves higher recognition accuracy than several state-of-the-art methods. This clearly highlights the benefit of feature decomposition and reconstruction for classifying expressions.
In this paper, we proposed to apply meta learning approach for low-resource automatic speech recognition (ASR). We formulated ASR for different languages as different tasks, and meta-learned the initialization parameters from many pretraining languages to achieve fast adaptation on unseen target language, via recently proposed model-agnostic meta learning algorithm (MAML). We evaluated the proposed approach using six languages as pretraining tasks and four languages as target tasks. Preliminary results showed that the proposed method, MetaASR, significantly outperforms the state-of-the-art multitask pretraining approach on all target languages with different combinations of pretraining languages. In addition, since MAML's model-agnostic property, this paper also opens new research direction of applying meta learning to more speech-related applications.
In this paper, we introduce the Reinforced Mnemonic Reader for machine reading comprehension tasks, which enhances previous attentive readers in two aspects. First, a reattention mechanism is proposed to refine current attentions by directly accessing to past attentions that are temporally memorized in a multi-round alignment architecture, so as to avoid the problems of attention redundancy and attention deficiency. Second, a new optimization approach, called dynamic-critical reinforcement learning, is introduced to extend the standard supervised method. It always encourages to predict a more acceptable answer so as to address the convergence suppression problem occurred in traditional reinforcement learning algorithms. Extensive experiments on the Stanford Question Answering Dataset (SQuAD) show that our model achieves state-of-the-art results. Meanwhile, our model outperforms previous systems by over 6% in terms of both Exact Match and F1 metrics on two adversarial SQuAD datasets.
In this paper we address issues with image retrieval benchmarking on standard and popular Oxford 5k and Paris 6k datasets. In particular, annotation errors, the size of the dataset, and the level of challenge are addressed: new annotation for both datasets is created with an extra attention to the reliability of the ground truth. Three new protocols of varying difficulty are introduced. The protocols allow fair comparison between different methods, including those using a dataset pre-processing stage. For each dataset, 15 new challenging queries are introduced. Finally, a new set of 1M hard, semi-automatically cleaned distractors is selected. An extensive comparison of the state-of-the-art methods is performed on the new benchmark. Different types of methods are evaluated, ranging from local-feature-based to modern CNN based methods. The best results are achieved by taking the best of the two worlds. Most importantly, image retrieval appears far from being solved.
Attention mechanism has been used as an ancillary means to help RNN or CNN. However, the Transformer (Vaswani et al., 2017) recently recorded the state-of-the-art performance in machine translation with a dramatic reduction in training time by solely using attention. Motivated by the Transformer, Directional Self Attention Network (Shen et al., 2017), a fully attention-based sentence encoder, was proposed. It showed good performance with various data by using forward and backward directional information in a sentence. But in their study, not considered at all was the distance between words, an important feature when learning the local dependency to help understand the context of input text. We propose Distance-based Self-Attention Network, which considers the word distance by using a simple distance mask in order to model the local dependency without losing the ability of modeling global dependency which attention has inherent. Our model shows good performance with NLI data, and it records the new state-of-the-art result with SNLI data. Additionally, we show that our model has a strength in long sentences or documents.

注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191