

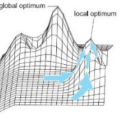
Neural Radiance Fields (NeRFs) have made great success in representing complex 3D scenes with high-resolution details and efficient memory. Nevertheless, current NeRF-based pose estimators have no initial pose prediction and are prone to local optima during optimization. In this paper, we present LATITUDE: Global Localization with Truncated Dynamic Low-pass Filter, which introduces a two-stage localization mechanism in city-scale NeRF. In place recognition stage, we train a regressor through images generated from trained NeRFs, which provides an initial value for global localization. In pose optimization stage, we minimize the residual between the observed image and rendered image by directly optimizing the pose on tangent plane. To avoid convergence to local optimum, we introduce a Truncated Dynamic Low-pass Filter (TDLF) for coarse-to-fine pose registration. We evaluate our method on both synthetic and real-world data and show its potential applications for high-precision navigation in large-scale city scenes. Codes and data will be publicly available at //github.com/jike5/LATITUDE.
相關內容
In practical applications, data is used to make decisions in two steps: estimation and optimization. First, a machine learning model estimates parameters for a structural model relating decisions to outcomes. Second, a decision is chosen to optimize the structural model's predicted outcome as if its parameters were correctly estimated. Due to its flexibility and simple implementation, this ``estimate-then-optimize'' approach is often used for data-driven decision-making. Errors in the estimation step can lead estimate-then-optimize to sub-optimal decisions that result in regret, i.e., a difference in value between the decision made and the best decision available with knowledge of the structural model's parameters. We provide a novel bound on this regret for smooth and unconstrained optimization problems. Using this bound, in settings where estimated parameters are linear transformations of sub-Gaussian random vectors, we provide a general procedure for experimental design to minimize the regret resulting from estimate-then-optimize. We demonstrate our approach on simple examples and a pandemic control application.
The maximum likelihood estimation of the left-truncated log-logistic distribution with a given truncation point is analyzed in detail from both mathematical and numerical perspectives. These maximum likelihood equations often do not possess a solution, even for small truncations. A simple criterion is provided for the existence of a regular maximum likelihood solution. In this case a profile likelihood function can be constructed and the optimisation problem is reduced to one dimension. When the maximum likelihood equations do not admit a solution for certain data samples, it is shown that the Pareto distribution is the $L^1$-limit of the degenerated left-truncated log-logistic distribution. Using this mathematical information, a highly efficient Monte Carlo simulation is performed to obtain critical values for some goodness-of-fit tests. The confidence tables and an interpolation formula are provided and several applications to real world data are presented.
We present a robot-to-human object handover algorithm and implement it on a 7-DOF arm equipped with a 3-finger mechanical hand. The system performs a fully autonomous and robust object handover to a human receiver in real-time. Our algorithm relies on two complementary sensor modalities: joint torque sensors on the arm and an eye-in-hand RGB-D camera for sensor feedback. Our approach is entirely implicit, i.e., there is no explicit communication between the robot and the human receiver. Information obtained via the aforementioned sensor modalities is used as inputs to their related deep neural networks. While the torque sensor network detects the human receiver's "intention" such as: pull, hold, or bump, the vision sensor network detects if the receiver's fingers have wrapped around the object. Networks' outputs are then fused, based on which a decision is made to either release the object or not. Despite substantive challenges in sensor feedback synchronization, object, and human hand detection, our system achieves robust robot-to-human handover with 98\% accuracy in our preliminary real experiments using human receivers.
Neural Ordinary Differential Equations (NODEs) have proven successful in learning dynamical systems in terms of accurately recovering the observed trajectories. While different types of sparsity have been proposed to improve robustness, the generalization properties of NODEs for dynamical systems beyond the observed data are underexplored. We systematically study the influence of weight and feature sparsity on forecasting as well as on identifying the underlying dynamical laws. Besides assessing existing methods, we propose a regularization technique to sparsify "input-output connections" and extract relevant features during training. Moreover, we curate real-world datasets consisting of human motion capture and human hematopoiesis single-cell RNA-seq data to realistically analyze different levels of out-of-distribution (OOD) generalization in forecasting and dynamics identification respectively. Our extensive empirical evaluation on these challenging benchmarks suggests that weight sparsity improves generalization in the presence of noise or irregular sampling. However, it does not prevent learning spurious feature dependencies in the inferred dynamics, rendering them impractical for predictions under interventions, or for inferring the true underlying dynamics. Instead, feature sparsity can indeed help with recovering sparse ground-truth dynamics compared to unregularized NODEs.
Cross-view geo-localization aims to estimate the GPS location of a query ground-view image by matching it to images from a reference database of geo-tagged aerial images. To address this challenging problem, recent approaches use panoramic ground-view images to increase the range of visibility. Although appealing, panoramic images are not readily available compared to the videos of limited Field-Of-View (FOV) images. In this paper, we present the first cross-view geo-localization method that works on a sequence of limited FOV images. Our model is trained end-to-end to capture the temporal structure that lies within the frames using the attention-based temporal feature aggregation module. To robustly tackle different sequences length and GPS noises during inference, we propose to use a sequential dropout scheme to simulate variant length sequences. To evaluate the proposed approach in realistic settings, we present a new large-scale dataset containing ground-view sequences along with the corresponding aerial-view images. Extensive experiments and comparisons demonstrate the superiority of the proposed approach compared to several competitive baselines.
Deep neural networks have shown excellent prospects in speech separation tasks. However, obtaining good results while keeping a low model complexity remains challenging in real-world applications. In this paper, we provide a bio-inspired efficient encoder-decoder architecture by mimicking the brain's top-down attention, called TDANet, with decreased model complexity without sacrificing performance. The top-down attention in TDANet is extracted by the global attention (GA) module and the cascaded local attention (LA) layers. The GA module takes multi-scale acoustic features as input to extract global attention signal, which then modulates features of different scales by direct top-down connections. The LA layers use features of adjacent layers as input to extract the local attention signal, which is used to modulate the lateral input in a top-down manner. On three benchmark datasets, TDANet consistently achieved competitive separation performance to previous state-of-the-art (SOTA) methods with higher efficiency. Specifically, TDANet's multiply-accumulate operations (MACs) are only 5\% of Sepformer, one of the previous SOTA models, and CPU inference time is only 10\% of Sepformer. In addition, a large-size version of TDANet obtained SOTA results on three datasets, with MACs still only 10\% of Sepformer and the CPU inference time only 24\% of Sepformer. Our study suggests that top-down attention can be a more efficient strategy for speech separation.
Since point clouds obtained from lidar are spatially discrete and non-repetitive, directly using point clouds to achieve object data association and robust state estimation is not a simple task. Further, tracking and analyzing the object states facilitates determining how they are involved in localization and mapping works. In this paper, we propose a least-squares estimator incorporating semantic 3D bounding boxes and geometric point clouds to achieve accurate and robust tracking of multiple objects. Then, the proposed tracker is integrated into a multi-object lidar odometry (MLO) system using only point clouds as input. By analyzing object motion states, the mapping module uses static objects and environmental features to eliminate accumulated errors. Meanwhile, the MLO system provides continuous object trajectories in map coordinate. Finally, we evaluate the effectiveness of the proposed semantic geometric fusion multi-object tracking (SGF-MOT) module and the localization accuracy of the MLO system under the public KITTI dataset.
This work provides a theoretical analysis for optimally solving the pose estimation problem using total least squares for vector observations from landmark features, which is central to applications involving simultaneous localization and mapping. First, the optimization process is formulated with observation vectors extracted from point-cloud features. Then, error-covariance expressions are derived. The attitude and position estimates obtained via the derived optimization process are proven to reach the bounds defined by the Cram\'er-Rao lower bound under the small-angle approximation of attitude errors. A fully populated observation noise-covariance matrix is assumed as the weight in the cost function to cover the most general case of the sensor uncertainty. This includes more generic correlations in the errors than previous cases involving an isotropic noise assumption. The proposed solution is verified using Monte Carlo simulations and an experiment with an actual LIDAR to validate the error-covariance analysis.
The acoustic inverse obstacle scattering problem consists of determining the shape of a domain from measurements of the scattered far field due to some set of incident fields (probes). For a penetrable object with known sound speed, this can be accomplished by treating the boundary alone as an unknown curve. Alternatively, one can treat the entire object as unknown and use a more general volumetric representation, without making use of the known sound speed. Both lead to strongly nonlinear and nonconvex optimization problems for which recursive linearization provides a useful framework for numerical analysis. After extending our shape optimization approach developed earlier for impenetrable bodies, we carry out a systematic study of both methods and compare their performance on a variety of examples. Our findings indicate that the volumetric approach is more robust, even though the number of degrees of freedom is significantly larger. We conclude with a discussion of this phenomenon and potential directions for further research.
A key requirement for the success of supervised deep learning is a large labeled dataset - a condition that is difficult to meet in medical image analysis. Self-supervised learning (SSL) can help in this regard by providing a strategy to pre-train a neural network with unlabeled data, followed by fine-tuning for a downstream task with limited annotations. Contrastive learning, a particular variant of SSL, is a powerful technique for learning image-level representations. In this work, we propose strategies for extending the contrastive learning framework for segmentation of volumetric medical images in the semi-supervised setting with limited annotations, by leveraging domain-specific and problem-specific cues. Specifically, we propose (1) novel contrasting strategies that leverage structural similarity across volumetric medical images (domain-specific cue) and (2) a local version of the contrastive loss to learn distinctive representations of local regions that are useful for per-pixel segmentation (problem-specific cue). We carry out an extensive evaluation on three Magnetic Resonance Imaging (MRI) datasets. In the limited annotation setting, the proposed method yields substantial improvements compared to other self-supervision and semi-supervised learning techniques. When combined with a simple data augmentation technique, the proposed method reaches within 8% of benchmark performance using only two labeled MRI volumes for training, corresponding to only 4% (for ACDC) of the training data used to train the benchmark.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191