

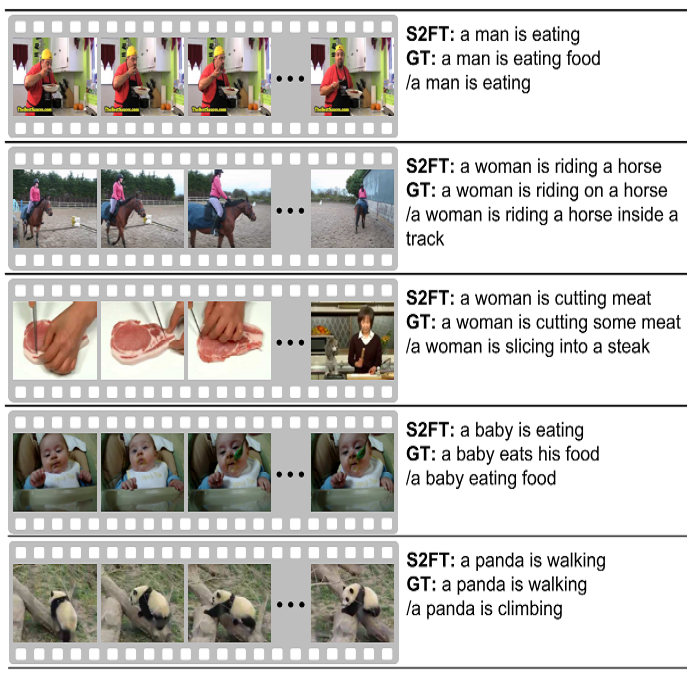
The CLIP model has been recently proven to be very effective for a variety of cross-modal tasks, including the evaluation of captions generated from vision-and-language architectures. In this paper, we propose a new recipe for a contrastive-based evaluation metric for image captioning, namely Positive-Augmented Contrastive learning Score (PAC-S), that in a novel way unifies the learning of a contrastive visual-semantic space with the addition of generated images and text on curated data. Experiments spanning several datasets demonstrate that our new metric achieves the highest correlation with human judgments on both images and videos, outperforming existing reference-based metrics like CIDEr and SPICE and reference-free metrics like CLIP-Score. Finally, we test the system-level correlation of the proposed metric when considering popular image captioning approaches, and assess the impact of employing different cross-modal features. Our source code and trained models are publicly available at: //github.com/aimagelab/pacscore.
相關內容
Aligning a robot's trajectory or map to the inertial frame is a critical capability that is often difficult to do accurately even though inertial measurement units (IMUs) can observe absolute roll and pitch with respect to gravity. Accelerometer biases and scale factor errors from the IMU's initial calibration are often the major source of inaccuracies when aligning the robot's odometry frame with the inertial frame, especially for low-grade IMUs. Practically, one would simultaneously estimate the true gravity vector, accelerometer biases, and scale factor to improve measurement quality but these quantities are not observable unless the IMU is sufficiently excited. While several methods estimate accelerometer bias and gravity, they do not explicitly address the observability issue nor do they estimate scale factor. We present a fixed-lag factor-graph-based estimator to address both of these issues. In addition to estimating accelerometer scale factor, our method mitigates limited observability by optimizing over a time window an order of magnitude larger than existing methods with significantly lower computational burden. The proposed method, which estimates accelerometer intrinsics and gravity separately from the other states, is enabled by a novel, velocity-agnostic measurement model for intrinsics and gravity, as well as a new method for gravity vector optimization on $S^2$. Accurate IMU state prediction, gravity-alignment, and roll/pitch drift correction are experimentally demonstrated on public and self-collected datasets in diverse environments.
Achieving real-time capability is an essential prerequisite for the industrial implementation of nonlinear model predictive control (NMPC). Data-driven model reduction offers a way to obtain low-order control models from complex digital twins. In particular, data-driven approaches require little expert knowledge of the particular process and its model, and provide reduced models of a well-defined generic structure. Herein, we apply our recently proposed data-driven reduction strategy based on Koopman theory [Schulze et al. (2022), Comput. Chem. Eng.] to generate a low-order control model of an air separation unit (ASU). The reduced Koopman model combines autoencoders and linear latent dynamics and is constructed using machine learning. Further, we present an NMPC implementation that uses derivative computation tailored to the fixed block structure of reduced Koopman models. Our reduction approach with tailored NMPC implementation enables real-time NMPC of an ASU at an average CPU time decrease by 98 %.
Continual learning is a challenging problem in which models need to be trained on non-stationary data across sequential tasks for class-incremental learning. While previous methods have focused on using either regularization or rehearsal-based frameworks to alleviate catastrophic forgetting in image classification, they are limited to a single modality and cannot learn compact class-aware cross-modal representations for continual audio-visual learning. To address this gap, we propose a novel class-incremental grouping network (CIGN) that can learn category-wise semantic features to achieve continual audio-visual learning. Our CIGN leverages learnable audio-visual class tokens and audio-visual grouping to continually aggregate class-aware features. Additionally, it utilizes class tokens distillation and continual grouping to prevent forgetting parameters learned from previous tasks, thereby improving the model's ability to capture discriminative audio-visual categories. We conduct extensive experiments on VGGSound-Instruments, VGGSound-100, and VGG-Sound Sources benchmarks. Our experimental results demonstrate that the CIGN achieves state-of-the-art audio-visual class-incremental learning performance. Code is available at //github.com/stoneMo/CIGN.
We study the approximability of computing the partition functions of two-state spin systems. The problem is parameterized by a $2\times 2$ symmetric matrix. Previous results on this problem were restricted either to the case where the matrix has non-negative entries, or to the case where the diagonal entries are equal, i.e. Ising models. In this paper, we study the generalization to arbitrary $2\times 2$ interaction matrices with real entries. We show that in some regions of the parameter space, it's \#P-hard to even determine the sign of the partition function, while in other regions there are fully polynomial approximation schemes for the partition function. Our results reveal several new computational phase transitions.
The SOTA in transcription of disfluent and conversational speech has in recent years favored two-stage models, with separate transcription and cleaning stages. We believe that previous attempts at end-to-end disfluency removal have fallen short because of the representational advantage that large-scale language model pretraining has given to lexical models. Until recently, the high dimensionality and limited availability of large audio datasets inhibited the development of large-scale self-supervised pretraining objectives for learning effective audio representations, giving a relative advantage to the two-stage approach, which utilises pretrained representations for lexical tokens. In light of recent successes in large scale audio pretraining, we revisit the performance comparison between two-stage and end-to-end model and find that audio based language models pretrained using weak self-supervised objectives match or exceed the performance of similarly trained two-stage models, and further, that the choice of pretraining objective substantially effects a model's ability to be adapted to the disfluency removal task.
Graphs are used widely to model complex systems, and detecting anomalies in a graph is an important task in the analysis of complex systems. Graph anomalies are patterns in a graph that do not conform to normal patterns expected of the attributes and/or structures of the graph. In recent years, graph neural networks (GNNs) have been studied extensively and have successfully performed difficult machine learning tasks in node classification, link prediction, and graph classification thanks to the highly expressive capability via message passing in effectively learning graph representations. To solve the graph anomaly detection problem, GNN-based methods leverage information about the graph attributes (or features) and/or structures to learn to score anomalies appropriately. In this survey, we review the recent advances made in detecting graph anomalies using GNN models. Specifically, we summarize GNN-based methods according to the graph type (i.e., static and dynamic), the anomaly type (i.e., node, edge, subgraph, and whole graph), and the network architecture (e.g., graph autoencoder, graph convolutional network). To the best of our knowledge, this survey is the first comprehensive review of graph anomaly detection methods based on GNNs.
Deep neural models in recent years have been successful in almost every field, including extremely complex problem statements. However, these models are huge in size, with millions (and even billions) of parameters, thus demanding more heavy computation power and failing to be deployed on edge devices. Besides, the performance boost is highly dependent on redundant labeled data. To achieve faster speeds and to handle the problems caused by the lack of data, knowledge distillation (KD) has been proposed to transfer information learned from one model to another. KD is often characterized by the so-called `Student-Teacher' (S-T) learning framework and has been broadly applied in model compression and knowledge transfer. This paper is about KD and S-T learning, which are being actively studied in recent years. First, we aim to provide explanations of what KD is and how/why it works. Then, we provide a comprehensive survey on the recent progress of KD methods together with S-T frameworks typically for vision tasks. In general, we consider some fundamental questions that have been driving this research area and thoroughly generalize the research progress and technical details. Additionally, we systematically analyze the research status of KD in vision applications. Finally, we discuss the potentials and open challenges of existing methods and prospect the future directions of KD and S-T learning.
Federated Learning (FL) is a decentralized machine-learning paradigm, in which a global server iteratively averages the model parameters of local users without accessing their data. User heterogeneity has imposed significant challenges to FL, which can incur drifted global models that are slow to converge. Knowledge Distillation has recently emerged to tackle this issue, by refining the server model using aggregated knowledge from heterogeneous users, other than directly averaging their model parameters. This approach, however, depends on a proxy dataset, making it impractical unless such a prerequisite is satisfied. Moreover, the ensemble knowledge is not fully utilized to guide local model learning, which may in turn affect the quality of the aggregated model. Inspired by the prior art, we propose a data-free knowledge distillation} approach to address heterogeneous FL, where the server learns a lightweight generator to ensemble user information in a data-free manner, which is then broadcasted to users, regulating local training using the learned knowledge as an inductive bias. Empirical studies powered by theoretical implications show that, our approach facilitates FL with better generalization performance using fewer communication rounds, compared with the state-of-the-art.
Conventionally, spatiotemporal modeling network and its complexity are the two most concentrated research topics in video action recognition. Existing state-of-the-art methods have achieved excellent accuracy regardless of the complexity meanwhile efficient spatiotemporal modeling solutions are slightly inferior in performance. In this paper, we attempt to acquire both efficiency and effectiveness simultaneously. First of all, besides traditionally treating H x W x T video frames as space-time signal (viewing from the Height-Width spatial plane), we propose to also model video from the other two Height-Time and Width-Time planes, to capture the dynamics of video thoroughly. Secondly, our model is designed based on 2D CNN backbones and model complexity is well kept in mind by design. Specifically, we introduce a novel multi-view fusion (MVF) module to exploit video dynamics using separable convolution for efficiency. It is a plug-and-play module and can be inserted into off-the-shelf 2D CNNs to form a simple yet effective model called MVFNet. Moreover, MVFNet can be thought of as a generalized video modeling framework and it can specialize to be existing methods such as C2D, SlowOnly, and TSM under different settings. Extensive experiments are conducted on popular benchmarks (i.e., Something-Something V1 & V2, Kinetics, UCF-101, and HMDB-51) to show its superiority. The proposed MVFNet can achieve state-of-the-art performance with 2D CNN's complexity.
While existing machine learning models have achieved great success for sentiment classification, they typically do not explicitly capture sentiment-oriented word interaction, which can lead to poor results for fine-grained analysis at the snippet level (a phrase or sentence). Factorization Machine provides a possible approach to learning element-wise interaction for recommender systems, but they are not directly applicable to our task due to the inability to model contexts and word sequences. In this work, we develop two Position-aware Factorization Machines which consider word interaction, context and position information. Such information is jointly encoded in a set of sentiment-oriented word interaction vectors. Compared to traditional word embeddings, SWI vectors explicitly capture sentiment-oriented word interaction and simplify the parameter learning. Experimental results show that while they have comparable performance with state-of-the-art methods for document-level classification, they benefit the snippet/sentence-level sentiment analysis.
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191