

The widespread utilization of smartphones has provided extensive availability to Inertial Measurement Units, providing a wide range of sensory data that can be advantageous for the detection of transportation modes. The objective of this study is to propose a novel end-to-end approach to effectively explore a reduced amount of sensory data collected from a smartphone to achieve accurate mode detection in common daily traveling activities. Our approach, called Feature Pyramid biLSTM (FPbiLSTM), is characterized by its ability to reduce the number of sensors required and processing demands, resulting in a more efficient modeling process without sacrificing the quality of the outcomes than the other current models. FPbiLSTM extends an existing CNN biLSTM model with the Feature Pyramid Network, leveraging the advantages of both shallow layer richness and deeper layer feature resilience for capturing temporal moving patterns in various transportation modes. It exhibits an excellent performance by employing the data collected from only three out of seven sensors, i.e. accelerometers, gyroscopes, and magnetometers, in the 2018 Sussex-Huawei Locomotion (SHL) challenge dataset, attaining a noteworthy accuracy of 95.1% and an F1-score of 94.7% in detecting eight different transportation modes.
相關內容
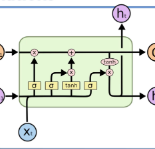
BiLSTM是Bi-directional Long Short-Term Memory的(de)縮寫(xie),是由前向LSTM與后(hou)向LSTM組合而成(cheng)。在自然語言處(chu)理(li)任務中都常被(bei)用來建模上下文信息(xi)。
Dense simultaneous localization and mapping (SLAM) is pivotal for embodied scene understanding. Recent work has shown that 3D Gaussians enable high-quality reconstruction and real-time rendering of scenes using multiple posed cameras. In this light, we show for the first time that representing a scene by 3D Gaussians can enable dense SLAM using a single unposed monocular RGB-D camera. Our method, SplaTAM, addresses the limitations of prior radiance field-based representations, including fast rendering and optimization, the ability to determine if areas have been previously mapped, and structured map expansion by adding more Gaussians. We employ an online tracking and mapping pipeline while tailoring it to specifically use an underlying Gaussian representation and silhouette-guided optimization via differentiable rendering. Extensive experiments show that SplaTAM achieves up to 2X state-of-the-art performance in camera pose estimation, map construction, and novel-view synthesis, demonstrating its superiority over existing approaches, while allowing real-time rendering of a high-resolution dense 3D map.
The security of microcontrollers, which drive modern IoT and embedded devices, continues to raise major concerns. Within a microcontroller (MCU), the firmware is a monolithic piece of software that contains the whole software stack, whereas a variety of peripherals represent the hardware. As MCU firmware contains vulnerabilities, it is ideal to test firmware with off-the-shelf software testing techniques, such as dynamic symbolic execution and fuzzing. Nevertheless, no emulator can emulate the diverse MCU peripherals or execute/test the firmware. Specifically, the interrupt interface, among all I/O interfaces used by MCU peripherals, is extremely challenging to emulate. In this paper, we present AIM -- a generic, scalable, and hardware-independent dynamic firmware analysis framework that supports unemulated MCU peripherals by a novel interrupt modeling mechanism. AIM effectively and efficiently covers interrupt-dependent code in firmware by a novel, firmware-guided, Just-in-Time Interrupt Firing technique. We implemented our framework in angr and performed dynamic symbolic execution for eight real-world MCU firmware. According to testing results, our framework covered up to 11.2 times more interrupt-dependent code than state-of-the-art approaches while accomplishing several challenging goals not feasible previously. Finally, a comparison with a state-of-the-art firmware fuzzer demonstrates dynamic symbolic execution and fuzzing together can achieve better firmware testing coverage.
The Shapley value is widely regarded as a trustworthy attribution metric. However, when people use Shapley values to explain the attribution of input variables of a deep neural network (DNN), it usually requires a very high computational cost to approximate relatively accurate Shapley values in real-world applications. Therefore, we propose a novel network architecture, the HarsanyiNet, which makes inferences on the input sample and simultaneously computes the exact Shapley values of the input variables in a single forward propagation. The HarsanyiNet is designed on the theoretical foundation that the Shapley value can be reformulated as the redistribution of Harsanyi interactions encoded by the network.
As Large Language Models (LLMs) become popular, there emerged an important trend of using multimodality to augment the LLMs' generation ability, which enables LLMs to better interact with the world. However, there lacks a unified perception of at which stage and how to incorporate different modalities. In this survey, we review methods that assist and augment generative models by retrieving multimodal knowledge, whose formats range from images, codes, tables, graphs, to audio. Such methods offer a promising solution to important concerns such as factuality, reasoning, interpretability, and robustness. By providing an in-depth review, this survey is expected to provide scholars with a deeper understanding of the methods' applications and encourage them to adapt existing techniques to the fast-growing field of LLMs.
With the recent surge in the use of touchscreen devices, free-hand sketching has emerged as a promising modality for human-computer interaction. While previous research has focused on tasks such as recognition, retrieval, and generation of familiar everyday objects, this study aims to create a Sketch Input Method Editor (SketchIME) specifically designed for a professional C4I system. Within this system, sketches are utilized as low-fidelity prototypes for recommending standardized symbols in the creation of comprehensive situation maps. This paper also presents a systematic dataset comprising 374 specialized sketch types, and proposes a simultaneous recognition and segmentation architecture with multilevel supervision between recognition and segmentation to improve performance and enhance interpretability. By incorporating few-shot domain adaptation and class-incremental learning, the network's ability to adapt to new users and extend to new task-specific classes is significantly enhanced. Results from experiments conducted on both the proposed dataset and the SPG dataset illustrate the superior performance of the proposed architecture. Our dataset and code are publicly available at //github.com/Anony517/SketchIME.
As robots become more widely available outside industrial settings, the need for reliable object grasping and manipulation is increasing. In such environments, robots must be able to grasp and manipulate novel objects in various situations. This paper presents GraspCaps, a novel architecture based on Capsule Networks for generating per-point 6D grasp configurations for familiar objects. GraspCaps extracts a rich feature vector of the objects present in the point cloud input, which is then used to generate per-point grasp vectors. This approach allows the network to learn specific grasping strategies for each object category. In addition to GraspCaps, the paper also presents a method for generating a large object-grasping dataset using simulated annealing. The obtained dataset is then used to train the GraspCaps network. Through extensive experiments, we evaluate the performance of the proposed approach, particularly in terms of the success rate of grasping familiar objects in challenging real and simulated scenarios. The experimental results showed that the overall object-grasping performance of the proposed approach is significantly better than the selected baseline. This superior performance highlights the effectiveness of the GraspCaps in achieving successful object grasping across various scenarios.
Diffusion models (DMs) have shown great potential for high-quality image synthesis. However, when it comes to producing images with complex scenes, how to properly describe both image global structures and object details remains a challenging task. In this paper, we present Frido, a Feature Pyramid Diffusion model performing a multi-scale coarse-to-fine denoising process for image synthesis. Our model decomposes an input image into scale-dependent vector quantized features, followed by a coarse-to-fine gating for producing image output. During the above multi-scale representation learning stage, additional input conditions like text, scene graph, or image layout can be further exploited. Thus, Frido can be also applied for conditional or cross-modality image synthesis. We conduct extensive experiments over various unconditioned and conditional image generation tasks, ranging from text-to-image synthesis, layout-to-image, scene-graph-to-image, to label-to-image. More specifically, we achieved state-of-the-art FID scores on five benchmarks, namely layout-to-image on COCO and OpenImages, scene-graph-to-image on COCO and Visual Genome, and label-to-image on COCO. Code is available at //github.com/davidhalladay/Frido.
Graph representation learning resurges as a trending research subject owing to the widespread use of deep learning for Euclidean data, which inspire various creative designs of neural networks in the non-Euclidean domain, particularly graphs. With the success of these graph neural networks (GNN) in the static setting, we approach further practical scenarios where the graph dynamically evolves. Existing approaches typically resort to node embeddings and use a recurrent neural network (RNN, broadly speaking) to regulate the embeddings and learn the temporal dynamics. These methods require the knowledge of a node in the full time span (including both training and testing) and are less applicable to the frequent change of the node set. In some extreme scenarios, the node sets at different time steps may completely differ. To resolve this challenge, we propose EvolveGCN, which adapts the graph convolutional network (GCN) model along the temporal dimension without resorting to node embeddings. The proposed approach captures the dynamism of the graph sequence through using an RNN to evolve the GCN parameters. Two architectures are considered for the parameter evolution. We evaluate the proposed approach on tasks including link prediction, edge classification, and node classification. The experimental results indicate a generally higher performance of EvolveGCN compared with related approaches. The code is available at \url{//github.com/IBM/EvolveGCN}.
Sentiment analysis is a widely studied NLP task where the goal is to determine opinions, emotions, and evaluations of users towards a product, an entity or a service that they are reviewing. One of the biggest challenges for sentiment analysis is that it is highly language dependent. Word embeddings, sentiment lexicons, and even annotated data are language specific. Further, optimizing models for each language is very time consuming and labor intensive especially for recurrent neural network models. From a resource perspective, it is very challenging to collect data for different languages. In this paper, we look for an answer to the following research question: can a sentiment analysis model trained on a language be reused for sentiment analysis in other languages, Russian, Spanish, Turkish, and Dutch, where the data is more limited? Our goal is to build a single model in the language with the largest dataset available for the task, and reuse it for languages that have limited resources. For this purpose, we train a sentiment analysis model using recurrent neural networks with reviews in English. We then translate reviews in other languages and reuse this model to evaluate the sentiments. Experimental results show that our robust approach of single model trained on English reviews statistically significantly outperforms the baselines in several different languages.
Deep learning has emerged as a powerful machine learning technique that learns multiple layers of representations or features of the data and produces state-of-the-art prediction results. Along with the success of deep learning in many other application domains, deep learning is also popularly used in sentiment analysis in recent years. This paper first gives an overview of deep learning and then provides a comprehensive survey of its current applications in sentiment analysis.



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191