

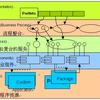
Modern RISC-V platforms control and monitor security-critical systems such as industrial controllers and autonomous vehicles. While these platforms feature a Root-of-Trust (RoT) to store authentication secrets and enable secure boot technologies, they often lack Control-Flow Integrity (CFI) enforcement and are vulnerable to cyber-attacks which divert the control flow of an application to trigger malicious behaviours. Recent techniques to enforce CFI in RISC-V systems include ISA modifications or custom hardware IPs, all requiring ad-hoc binary toolchains or design of CFI primitives in hardware. This paper proposes TitanCFI, a novel approach to enforce CFI in the RoT. TitanCFI modifies the commit stage of the protected core to stream control flow instructions to the RoT and it integrates the CFI enforcement policy in the RoT firmware. Our approach enables maximum reuse of the hardware resource present in the System-on-Chip (SoC), and it avoids the design of custom IPs and the modification of the compilation toolchain, while exploiting the RoT tamper-proof storage and cryptographic accelerators to secure CFI metadata. We implemented the proposed architecture on a modern RISC-V SoC along with a return address protection policy in the RoT, and benchmarked area and runtime overhead. Experimental results show that TitanCFI achieves overhead comparable to SoA hardware CFI solutions for most benchmarks, with lower area overhead, resulting in 1% of additional area occupation.
相關內容
Integration:Integration, the VLSI Journal。
Explanation:集(ji)成,VLSI雜志。
Publisher:Elsevier。
SIT:
In complex industrial and chemical process control rooms, effective decision-making is crucial for safety and effi- ciency. The experiments in this paper evaluate the impact and applications of an AI-based decision support system integrated into an improved human-machine interface, using dynamic influ- ence diagrams, a hidden Markov model, and deep reinforcement learning. The enhanced support system aims to reduce operator workload, improve situational awareness, and provide different intervention strategies to the operator adapted to the current state of both the system and human performance. Such a system can be particularly useful in cases of information overload when many alarms and inputs are presented all within the same time window, or for junior operators during training. A comprehensive cross-data analysis was conducted, involving 47 participants and a diverse range of data sources such as smartwatch metrics, eye- tracking data, process logs, and responses from questionnaires. The results indicate interesting insights regarding the effec- tiveness of the approach in aiding decision-making, decreasing perceived workload, and increasing situational awareness for the scenarios considered. Additionally, the results provide valuable insights to compare differences between styles of information gathering when using the system by individual participants. These findings are particularly relevant when predicting the overall performance of the individual participant and their capacity to successfully handle a plant upset and the alarms connected to it using process and human-machine interaction logs in real-time. These predictions enable the development of more effective intervention strategies.
Neural Information Retrieval (NIR) has significantly improved upon heuristic-based IR systems. Yet, failures remain frequent, the models used often being unable to retrieve documents relevant to the user's query. We address this challenge by proposing a lightweight abstention mechanism tailored for real-world constraints, with particular emphasis placed on the reranking phase. We introduce a protocol for evaluating abstention strategies in a black-box scenario, demonstrating their efficacy, and propose a simple yet effective data-driven mechanism. We provide open-source code for experiment replication and abstention implementation, fostering wider adoption and application in diverse contexts.
Large Language Model (LLM) services and models often come with legal rules on who can use them and how they must use them. Assessing the compliance of the released LLMs is crucial, as these rules protect the interests of the LLM contributor and prevent misuse. In this context, we describe the novel problem of Black-box Identity Verification (BBIV). The goal is to determine whether a third-party application uses a certain LLM through its chat function. We propose a method called Targeted Random Adversarial Prompt (TRAP) that identifies the specific LLM in use. We repurpose adversarial suffixes, originally proposed for jailbreaking, to get a pre-defined answer from the target LLM, while other models give random answers. TRAP detects the target LLMs with over 95% true positive rate at under 0.2% false positive rate even after a single interaction. TRAP remains effective even if the LLM has minor changes that do not significantly alter the original function.

In Optical Coherence Tomography (OCT), speckle noise significantly hampers image quality, affecting diagnostic accuracy. Current methods, including traditional filtering and deep learning techniques, have limitations in noise reduction and detail preservation. Addressing these challenges, this study introduces a novel denoising algorithm, Block-Matching Steered-Mixture of Experts with Multi-Model Inference and Autoencoder (BM-SMoE-AE). This method combines block-matched implementation of the SMoE algorithm with an enhanced autoencoder architecture, offering efficient speckle noise reduction while retaining critical image details. Our method stands out by providing improved edge definition and reduced processing time. Comparative analysis with existing denoising techniques demonstrates the superior performance of BM-SMoE-AE in maintaining image integrity and enhancing OCT image usability for medical diagnostics.
As Large Language Models (LLMs) are integrated into critical real-world applications, their strategic and logical reasoning abilities are increasingly crucial. This paper evaluates LLMs' reasoning abilities in competitive environments through game-theoretic tasks, e.g., board and card games that require pure logic and strategic reasoning to compete with opponents. We first propose GTBench, a language-driven environment composing 10 widely-recognized tasks, across a comprehensive game taxonomy: complete versus incomplete information, dynamic versus static, and probabilistic versus deterministic scenarios. Then, we investigate two key problems: (1) Characterizing game-theoretic reasoning of LLMs; (2) LLM-vs-LLM competitions as reasoning evaluation. We observe that (1) LLMs have distinct behaviors regarding various gaming scenarios; for example, LLMs fail in complete and deterministic games yet they are competitive in probabilistic gaming scenarios; (2) Open-source LLMs, e.g., CodeLlama-34b-Instruct, are less competitive than commercial LLMs, e.g., GPT-4, in complex games. In addition, code-pretraining greatly benefits strategic reasoning, while advanced reasoning methods such as Chain-of-Thought (CoT) and Tree-of-Thought (ToT) do not always help. Detailed error profiles are also provided for a better understanding of LLMs' behavior.
The Voronoi Density Estimator (VDE) is an established density estimation technique that adapts to the local geometry of data. However, its applicability has been so far limited to problems in two and three dimensions. This is because Voronoi cells rapidly increase in complexity as dimensions grow, making the necessary explicit computations infeasible. We define a variant of the VDE deemed Compactified Voronoi Density Estimator (CVDE), suitable for higher dimensions. We propose computationally efficient algorithms for numerical approximation of the CVDE and formally prove convergence of the estimated density to the original one. We implement and empirically validate the CVDE through a comparison with the Kernel Density Estimator (KDE). Our results indicate that the CVDE outperforms the KDE on sound and image data.
Neuro-Symbolic (NeSy) predictors that conform to symbolic knowledge - encoding, e.g., safety constraints - can be affected by Reasoning Shortcuts (RSs): They learn concepts consistent with the symbolic knowledge by exploiting unintended semantics. RSs compromise reliability and generalization and, as we show in this paper, they are linked to NeSy models being overconfident about the predicted concepts. Unfortunately, the only trustworthy mitigation strategy requires collecting costly dense supervision over the concepts. Rather than attempting to avoid RSs altogether, we propose to ensure NeSy models are aware of the semantic ambiguity of the concepts they learn, thus enabling their users to identify and distrust low-quality concepts. Starting from three simple desiderata, we derive bears (BE Aware of Reasoning Shortcuts), an ensembling technique that calibrates the model's concept-level confidence without compromising prediction accuracy, thus encouraging NeSy architectures to be uncertain about concepts affected by RSs. We show empirically that bears improves RS-awareness of several state-of-the-art NeSy models, and also facilitates acquiring informative dense annotations for mitigation purposes.
Existing retrieval-based methods have made significant strides in maintaining long-term conversations. However, these approaches face challenges in memory database management and accurate memory retrieval, hindering their efficacy in dynamic, real-world interactions. This study introduces a novel framework, COmpressive Memory-Enhanced Dialogue sYstems (COMEDY), which eschews traditional retrieval modules and memory databases. Instead, COMEDY adopts a ''One-for-All'' approach, utilizing a single language model to manage memory generation, compression, and response generation. Central to this framework is the concept of compressive memory, which intergrates session-specific summaries, user-bot dynamics, and past events into a concise memory format. To support COMEDY, we curated a large-scale Chinese instruction-tuning dataset, Dolphin, derived from real user-chatbot interactions. Comparative evaluations demonstrate COMEDY's superiority over traditional retrieval-based methods in producing more nuanced and human-like conversational experiences. Our codes are available at //github.com/nuochenpku/COMEDY.
In-car Voice Assistants (VAs) play an increasingly critical role in automotive user interface design. However, existing VAs primarily perform simple 'query-answer' tasks, limiting their ability to sustain drivers' long-term attention. In this study, we investigate the effectiveness of an in-car Robot Assistant (RA) that offers functionalities beyond voice interaction. We aim to answer the question: How does the presence of a social robot impact user experience in real driving scenarios? Our study begins with a user survey to understand perspectives on in-car VAs and their influence on driving experiences. We then conduct non-driving and on-road experiments with selected participants to assess user experiences with an RA. Additionally, we conduct subjective ratings to evaluate user perceptions of the RA's personality, which is crucial for robot design. We also explore potential concerns regarding ethical risks. Finally, we provide a comprehensive discussion and recommendations for the future development of in-car RAs.
We present FedKit, a federated learning (FL) system tailored for cross-platform FL research on Android and iOS devices. FedKit pipelines cross-platform FL development by enabling model conversion, hardware-accelerated training, and cross-platform model aggregation. Our FL workflow supports flexible machine learning operations (MLOps) in production, facilitating continuous model delivery and training. We have deployed FedKit in a real-world use case for health data analysis on university campuses, demonstrating its effectiveness. FedKit is open-source at //github.com/FedCampus/FedKit.
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191