


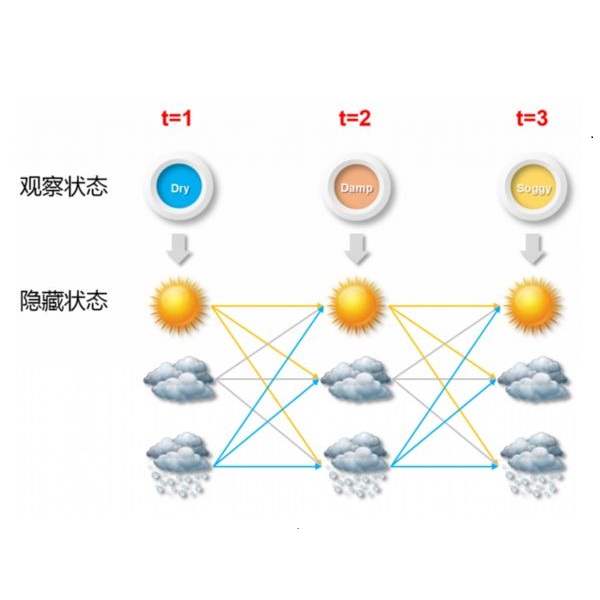
This paper considers centralized mission-planning for a heterogeneous multi-agent system with the aim of locating a hidden target. We propose a mixed observable setting, consisting of a fully observable state-space and a partially observable environment, using a hidden Markov model. First, we construct rapidly exploring random trees (RRTs) to introduce the mixed observable RRT for finding plausible mission plans giving way-points for each agent. Leveraging this construction, we present a path-selection strategy based on a dynamic programming approach, which accounts for the uncertainty from partial observations and minimizes the expected cost. Finally, we combine the high-level plan with model predictive controllers to evaluate the approach on an experimental setup consisting of a quadruped robot and a drone. It is shown that agents are able to make intelligent decisions to explore the area efficiently and to locate the target through collaborative actions.
相關內容
We study planning problems for dynamical systems with uncertainty caused by measurement and process noise. Measurement noise causes limited observability of system states, and process noise causes uncertainty in the outcome of a given control. The problem is to find a controller that guarantees that the system reaches a desired goal state in finite time while avoiding obstacles, with at least some required probability. Due to the noise, this problem does not admit exact algorithmic or closed-form solutions in general. Our key contribution is a novel planning scheme that employs Kalman filtering as a state estimator to obtain a finite-state abstraction of the dynamical system, which we formalize as a Markov decision process (MDP). By extending this MDP with intervals of probabilities, we enhance the robustness of the model against numerical imprecision in approximating the transition probabilities. For this so-called interval MDP (iMDP), we employ state-of-the-art verification techniques to efficiently compute plans that maximize the probability of reaching goal states. We show the correctness of the abstraction and provide several optimizations that aim to balance the quality of the plan and the scalability of the approach. We demonstrate that our method is able to handle systems with a 6-dimensional state that result in iMDPs with tens of thousands of states and millions of transitions.
In the trial-and-error mechanism of reinforcement learning (RL), a notorious contradiction arises when we expect to learn a safe policy: how to learn a safe policy without enough data and prior model about the dangerous region? Existing methods mostly use the posterior penalty for dangerous actions, which means that the agent is not penalized until experiencing danger. This fact causes that the agent cannot learn a zero-violation policy even after convergence. Otherwise, it would not receive any penalty and lose the knowledge about danger. In this paper, we propose the safe set actor-critic (SSAC) algorithm, which confines the policy update using safety-oriented energy functions, or the safety indexes. The safety index is designed to increase rapidly for potentially dangerous actions, which allows us to locate the safe set on the action space, or the control safe set. Therefore, we can identify the dangerous actions prior to taking them, and further obtain a zero constraint-violation policy after convergence.We claim that we can learn the energy function in a model-free manner similar to learning a value function. By using the energy function transition as the constraint objective, we formulate a constrained RL problem. We prove that our Lagrangian-based solutions make sure that the learned policy will converge to the constrained optimum under some assumptions. The proposed algorithm is evaluated on both the complex simulation environments and a hardware-in-loop (HIL) experiment with a real controller from the autonomous vehicle. Experimental results suggest that the converged policy in all environments achieves zero constraint violation and comparable performance with model-based baselines.
Data-driven simulators promise high data-efficiency for driving policy learning. When used for modelling interactions, this data-efficiency becomes a bottleneck: Small underlying datasets often lack interesting and challenging edge cases for learning interactive driving. We address this challenge by proposing a simulation method that uses in-painted ado vehicles for learning robust driving policies. Thus, our approach can be used to learn policies that involve multi-agent interactions and allows for training via state-of-the-art policy learning methods. We evaluate the approach for learning standard interaction scenarios in driving. In extensive experiments, our work demonstrates that the resulting policies can be directly transferred to a full-scale autonomous vehicle without making use of any traditional sim-to-real transfer techniques such as domain randomization.
Active inference is a unifying theory for perception and action resting upon the idea that the brain maintains an internal model of the world by minimizing free energy. From a behavioral perspective, active inference agents can be seen as self-evidencing beings that act to fulfill their optimistic predictions, namely preferred outcomes or goals. In contrast, reinforcement learning requires human-designed rewards to accomplish any desired outcome. Although active inference could provide a more natural self-supervised objective for control, its applicability has been limited because of the shortcomings in scaling the approach to complex environments. In this work, we propose a contrastive objective for active inference that strongly reduces the computational burden in learning the agent's generative model and planning future actions. Our method performs notably better than likelihood-based active inference in image-based tasks, while also being computationally cheaper and easier to train. We compare to reinforcement learning agents that have access to human-designed reward functions, showing that our approach closely matches their performance. Finally, we also show that contrastive methods perform significantly better in the case of distractors in the environment and that our method is able to generalize goals to variations in the background.
Imitation learning enables agents to reuse and adapt the hard-won expertise of others, offering a solution to several key challenges in learning behavior. Although it is easy to observe behavior in the real-world, the underlying actions may not be accessible. We present a new method for imitation solely from observations that achieves comparable performance to experts on challenging continuous control tasks while also exhibiting robustness in the presence of observations unrelated to the task. Our method, which we call FORM (for "Future Observation Reward Model") is derived from an inverse RL objective and imitates using a model of expert behavior learned by generative modelling of the expert's observations, without needing ground truth actions. We show that FORM performs comparably to a strong baseline IRL method (GAIL) on the DeepMind Control Suite benchmark, while outperforming GAIL in the presence of task-irrelevant features.
Many important real-world problems have action spaces that are high-dimensional, continuous or both, making full enumeration of all possible actions infeasible. Instead, only small subsets of actions can be sampled for the purpose of policy evaluation and improvement. In this paper, we propose a general framework to reason in a principled way about policy evaluation and improvement over such sampled action subsets. This sample-based policy iteration framework can in principle be applied to any reinforcement learning algorithm based upon policy iteration. Concretely, we propose Sampled MuZero, an extension of the MuZero algorithm that is able to learn in domains with arbitrarily complex action spaces by planning over sampled actions. We demonstrate this approach on the classical board game of Go and on two continuous control benchmark domains: DeepMind Control Suite and Real-World RL Suite.
Autonomous urban driving navigation with complex multi-agent dynamics is under-explored due to the difficulty of learning an optimal driving policy. The traditional modular pipeline heavily relies on hand-designed rules and the pre-processing perception system while the supervised learning-based models are limited by the accessibility of extensive human experience. We present a general and principled Controllable Imitative Reinforcement Learning (CIRL) approach which successfully makes the driving agent achieve higher success rates based on only vision inputs in a high-fidelity car simulator. To alleviate the low exploration efficiency for large continuous action space that often prohibits the use of classical RL on challenging real tasks, our CIRL explores over a reasonably constrained action space guided by encoded experiences that imitate human demonstrations, building upon Deep Deterministic Policy Gradient (DDPG). Moreover, we propose to specialize adaptive policies and steering-angle reward designs for different control signals (i.e. follow, straight, turn right, turn left) based on the shared representations to improve the model capability in tackling with diverse cases. Extensive experiments on CARLA driving benchmark demonstrate that CIRL substantially outperforms all previous methods in terms of the percentage of successfully completed episodes on a variety of goal-directed driving tasks. We also show its superior generalization capability in unseen environments. To our knowledge, this is the first successful case of the learned driving policy through reinforcement learning in the high-fidelity simulator, which performs better-than supervised imitation learning.
Mobile network that millions of people use every day is one of the most complex systems in real world. Optimization of mobile network to meet exploding customer demand and reduce CAPEX/OPEX poses greater challenges than in prior works. Actually, learning to solve complex problems in real world to benefit everyone and make the world better has long been ultimate goal of AI. However, application of deep reinforcement learning (DRL) to complex problems in real world still remains unsolved, due to imperfect information, data scarcity and complex rules in real world, potential negative impact to real world, etc. To bridge this reality gap, we propose a sim-to-real framework to direct transfer learning from simulation to real world without any training in real world. First, we distill temporal-spatial relationships between cells and mobile users to scalable 3D image-like tensor to best characterize partially observed mobile network. Second, inspired by AlphaGo, we introduce a novel self-play mechanism to empower DRL agents to gradually improve intelligence by competing for best record on multiple tasks, just like athletes compete for world record in decathlon. Third, a decentralized DRL method is proposed to coordinate multi-agents to compete and cooperate as a team to maximize global reward and minimize potential negative impact. Using 7693 unseen test tasks over 160 unseen mobile networks in another simulator as well as 6 field trials on 4 commercial mobile networks in real world, we demonstrate the capability of this sim-to-real framework to direct transfer the learning not only from one simulator to another simulator, but also from simulation to real world. This is the first time that a DRL agent successfully transfers its learning directly from simulation to very complex real world problems with imperfect information, complex rules, huge state/action space, and multi-agent interactions.
We introduce Interactive Question Answering (IQA), the task of answering questions that require an autonomous agent to interact with a dynamic visual environment. IQA presents the agent with a scene and a question, like: "Are there any apples in the fridge?" The agent must navigate around the scene, acquire visual understanding of scene elements, interact with objects (e.g. open refrigerators) and plan for a series of actions conditioned on the question. Popular reinforcement learning approaches with a single controller perform poorly on IQA owing to the large and diverse state space. We propose the Hierarchical Interactive Memory Network (HIMN), consisting of a factorized set of controllers, allowing the system to operate at multiple levels of temporal abstraction. To evaluate HIMN, we introduce IQUAD V1, a new dataset built upon AI2-THOR, a simulated photo-realistic environment of configurable indoor scenes with interactive objects. IQUAD V1 has 75,000 questions, each paired with a unique scene configuration. Our experiments show that our proposed model outperforms popular single controller based methods on IQUAD V1. For sample questions and results, please view our video: //youtu.be/pXd3C-1jr98.
We explore deep reinforcement learning methods for multi-agent domains. We begin by analyzing the difficulty of traditional algorithms in the multi-agent case: Q-learning is challenged by an inherent non-stationarity of the environment, while policy gradient suffers from a variance that increases as the number of agents grows. We then present an adaptation of actor-critic methods that considers action policies of other agents and is able to successfully learn policies that require complex multi-agent coordination. Additionally, we introduce a training regimen utilizing an ensemble of policies for each agent that leads to more robust multi-agent policies. We show the strength of our approach compared to existing methods in cooperative as well as competitive scenarios, where agent populations are able to discover various physical and informational coordination strategies.
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191