


This paper presents a method for optimizing object detection models by combining weight pruning and singular value decomposition (SVD). The proposed method was evaluated on a custom dataset of street work images obtained from //universe.roboflow.com/roboflow-100/street-work. The dataset consists of 611 training images, 175 validation images, and 87 test images with 7 classes. We compared the performance of the optimized models with the original unoptimized model in terms of frame rate, mean average precision (mAP@50), and weight size. The results show that the weight pruning + SVD model achieved a 0.724 mAP@50 with a frame rate of 1.48 FPS and a weight size of 12.1 MB, outperforming the original model (0.717 mAP@50, 1.50 FPS, and 12.3 MB). Precision-recall curves were also plotted for all models. Our work demonstrates that the proposed method can effectively optimize object detection models while balancing accuracy, speed, and model size.
相關內容
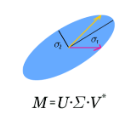
奇(qi)異(yi)值(zhi)分(fen)解(jie)(jie)(Singular Value Decomposition)是線性代數(shu)中(zhong)一種重要(yao)的(de)矩陣(zhen)分(fen)解(jie)(jie),奇(qi)異(yi)值(zhi)分(fen)解(jie)(jie)則是特征分(fen)解(jie)(jie)在任意矩陣(zhen)上的(de)推廣(guang)。在信號處理、統計學等(deng)領域有重要(yao)應用(yong)。
Although lane detection methods have shown impressive performance in real-world scenarios, most of methods require post-processing which is not robust enough. Therefore, end-to-end detectors like DEtection TRansformer(DETR) have been introduced in lane detection. However, one-to-one label assignment in DETR can degrade the training efficiency due to label semantic conflicts. Besides, positional query in DETR is unable to provide explicit positional prior, making it difficult to be optimized. In this paper, we present the One-to-Several Transformer(O2SFormer). We first propose the one-to-several label assignment, which combines one-to-one and one-to-many label assignments to improve the training efficiency while keeping end-to-end detection. To overcome the difficulty in optimizing one-to-one assignment. We further propose the layer-wise soft label which adjusts the positive weight of positive lane anchors across different decoder layers. Finally, we design the dynamic anchor-based positional query to explore positional prior by incorporating lane anchors into positional query. Experimental results show that O2SFormer significantly speeds up the convergence of DETR and outperforms Transformer-based and CNN-based detectors on the CULane dataset. Code will be available at //github.com/zkyseu/O2SFormer.
This work deals with developing two fast randomized algorithms for computing the generalized tensor singular value decomposition (GTSVD) based on the tubal product (t-product). The random projection method is utilized to compute the important actions of the underlying data tensors and use them to get small sketches of the original data tensors, which are easier to be handled. Due to the small size of the sketch tensors, deterministic approaches are applied to them to compute their GTSVDs. Then, from the GTSVD of the small sketch tensors, the GTSVD of the original large-scale data tensors is recovered. Some experiments are conducted to show the effectiveness of the proposed approach.
Improving Post-Training Quantization on Object Detection with Task Loss-Guided Lp Metric
Efficient inference for object detection networks is a major challenge on edge devices. Post-Training Quantization (PTQ), which transforms a full-precision model into low bit-width directly, is an effective and convenient approach to reduce model inference complexity. But it suffers severe accuracy drop when applied to complex tasks such as object detection. PTQ optimizes the quantization parameters by different metrics to minimize the perturbation of quantization. The p-norm distance of feature maps before and after quantization, Lp, is widely used as the metric to evaluate perturbation. For the specialty of object detection network, we observe that the parameter p in Lp metric will significantly influence its quantization performance. We indicate that using a fixed hyper-parameter p does not achieve optimal quantization performance. To mitigate this problem, we propose a framework, DetPTQ, to assign different p values for quantizing different layers using an Object Detection Output Loss (ODOL), which represents the task loss of object detection. DetPTQ employs the ODOL-based adaptive Lp metric to select the optimal quantization parameters. Experiments show that our DetPTQ outperforms the state-of-the-art PTQ methods by a significant margin on both 2D and 3D object detectors. For example, we achieve 31.1/31.7(quantization/full-precision) mAP on RetinaNet-ResNet18 with 4-bit weight and 4-bit activation.
Photoplethysmogram (PPG) signals are easily contaminated by motion artifacts in real-world settings, despite their widespread use in Internet-of-Things (IoT) based wearable and smart health devices for cardiovascular health monitoring. This study proposed a lightweight deep neural network, called Tiny-PPG, for accurate and real-time PPG artifact segmentation on IoT edge devices. The model was trained and tested on a public dataset, PPG DaLiA, which featured complex artifacts with diverse lengths and morphologies during various daily activities of 15 subjects using a watch-type device (Empatica E4). The model structure, training method and loss function were specifically designed to balance detection accuracy and speed for real-time PPG artifact detection in resource-constrained embedded devices. To optimize the model size and capability in multi-scale feature representation, the model employed deep separable convolution and atrous spatial pyramid pooling modules, respectively. Additionally, the contrastive loss was also utilized to further optimize the feature embeddings. With additional model pruning, Tiny-PPG achieved state-of-the-art detection accuracy of 87.8% while only having 19,726 model parameters (0.15 megabytes), and was successfully deployed on an STM32 embedded system for real-time PPG artifact detection. Therefore, this study provides an effective solution for resource-constraint IoT smart health devices in PPG artifact detection.
Object detection with transformers (DETR) reaches competitive performance with Faster R-CNN via a transformer encoder-decoder architecture. Inspired by the great success of pre-training transformers in natural language processing, we propose a pretext task named random query patch detection to unsupervisedly pre-train DETR (UP-DETR) for object detection. Specifically, we randomly crop patches from the given image and then feed them as queries to the decoder. The model is pre-trained to detect these query patches from the original image. During the pre-training, we address two critical issues: multi-task learning and multi-query localization. (1) To trade-off multi-task learning of classification and localization in the pretext task, we freeze the CNN backbone and propose a patch feature reconstruction branch which is jointly optimized with patch detection. (2) To perform multi-query localization, we introduce UP-DETR from single-query patch and extend it to multi-query patches with object query shuffle and attention mask. In our experiments, UP-DETR significantly boosts the performance of DETR with faster convergence and higher precision on PASCAL VOC and COCO datasets. The code will be available soon.
Co-saliency detection aims to discover the common and salient foregrounds from a group of relevant images. For this task, we present a novel adaptive graph convolutional network with attention graph clustering (GCAGC). Three major contributions have been made, and are experimentally shown to have substantial practical merits. First, we propose a graph convolutional network design to extract information cues to characterize the intra- and interimage correspondence. Second, we develop an attention graph clustering algorithm to discriminate the common objects from all the salient foreground objects in an unsupervised fashion. Third, we present a unified framework with encoder-decoder structure to jointly train and optimize the graph convolutional network, attention graph cluster, and co-saliency detection decoder in an end-to-end manner. We evaluate our proposed GCAGC method on three cosaliency detection benchmark datasets (iCoseg, Cosal2015 and COCO-SEG). Our GCAGC method obtains significant improvements over the state-of-the-arts on most of them.
Benefit from the quick development of deep learning techniques, salient object detection has achieved remarkable progresses recently. However, there still exists following two major challenges that hinder its application in embedded devices, low resolution output and heavy model weight. To this end, this paper presents an accurate yet compact deep network for efficient salient object detection. More specifically, given a coarse saliency prediction in the deepest layer, we first employ residual learning to learn side-output residual features for saliency refinement, which can be achieved with very limited convolutional parameters while keep accuracy. Secondly, we further propose reverse attention to guide such side-output residual learning in a top-down manner. By erasing the current predicted salient regions from side-output features, the network can eventually explore the missing object parts and details which results in high resolution and accuracy. Experiments on six benchmark datasets demonstrate that the proposed approach compares favorably against state-of-the-art methods, and with advantages in terms of simplicity, efficiency (45 FPS) and model size (81 MB).
It is a common paradigm in object detection frameworks to treat all samples equally and target at maximizing the performance on average. In this work, we revisit this paradigm through a careful study on how different samples contribute to the overall performance measured in terms of mAP. Our study suggests that the samples in each mini-batch are neither independent nor equally important, and therefore a better classifier on average does not necessarily mean higher mAP. Motivated by this study, we propose the notion of Prime Samples, those that play a key role in driving the detection performance. We further develop a simple yet effective sampling and learning strategy called PrIme Sample Attention (PISA) that directs the focus of the training process towards such samples. Our experiments demonstrate that it is often more effective to focus on prime samples than hard samples when training a detector. Particularly, On the MSCOCO dataset, PISA outperforms the random sampling baseline and hard mining schemes, e.g. OHEM and Focal Loss, consistently by more than 1% on both single-stage and two-stage detectors, with a strong backbone ResNeXt-101.
Video anomaly detection under weak labels is formulated as a typical multiple-instance learning problem in previous works. In this paper, we provide a new perspective, i.e., a supervised learning task under noisy labels. In such a viewpoint, as long as cleaning away label noise, we can directly apply fully supervised action classifiers to weakly supervised anomaly detection, and take maximum advantage of these well-developed classifiers. For this purpose, we devise a graph convolutional network to correct noisy labels. Based upon feature similarity and temporal consistency, our network propagates supervisory signals from high-confidence snippets to low-confidence ones. In this manner, the network is capable of providing cleaned supervision for action classifiers. During the test phase, we only need to obtain snippet-wise predictions from the action classifier without any extra post-processing. Extensive experiments on 3 datasets at different scales with 2 types of action classifiers demonstrate the efficacy of our method. Remarkably, we obtain the frame-level AUC score of 82.12% on UCF-Crime.
We consider the task of weakly supervised one-shot detection. In this task, we attempt to perform a detection task over a set of unseen classes, when training only using weak binary labels that indicate the existence of a class instance in a given example. The model is conditioned on a single exemplar of an unseen class and a target example that may or may not contain an instance of the same class as the exemplar. A similarity map is computed by using a Siamese neural network to map the exemplar and regions of the target example to a latent representation space and then computing cosine similarity scores between representations. An attention mechanism weights different regions in the target example, and enables learning of the one-shot detection task using the weaker labels alone. The model can be applied to detection tasks from different domains, including computer vision object detection. We evaluate our attention Siamese networks on a one-shot detection task from the audio domain, where it detects audio keywords in spoken utterances. Our model considerably outperforms a baseline approach and yields a 42.6% average precision for detection across 10 unseen classes. Moreover, architectural developments from computer vision object detection models such as a region proposal network can be incorporated into the model architecture, and results show that performance is expected to improve by doing so.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191