


Most existing animal pose and shape estimation approaches reconstruct animal meshes with a parametric SMAL model. This is because the low-dimensional pose and shape parameters of the SMAL model makes it easier for deep networks to learn the high-dimensional animal meshes. However, the SMAL model is learned from scans of toy animals with limited pose and shape variations, and thus may not be able to represent highly varying real animals well. This may result in poor fittings of the estimated meshes to the 2D evidences, e.g. 2D keypoints or silhouettes. To mitigate this problem, we propose a coarse-to-fine approach to reconstruct 3D animal mesh from a single image. The coarse estimation stage first estimates the pose, shape and translation parameters of the SMAL model. The estimated meshes are then used as a starting point by a graph convolutional network (GCN) to predict a per-vertex deformation in the refinement stage. This combination of SMAL-based and vertex-based representations benefits from both parametric and non-parametric representations. We design our mesh refinement GCN (MRGCN) as an encoder-decoder structure with hierarchical feature representations to overcome the limited receptive field of traditional GCNs. Moreover, we observe that the global image feature used by existing animal mesh reconstruction works is unable to capture detailed shape information for mesh refinement. We thus introduce a local feature extractor to retrieve a vertex-level feature and use it together with the global feature as the input of the MRGCN. We test our approach on the StanfordExtra dataset and achieve state-of-the-art results. Furthermore, we test the generalization capacity of our approach on the Animal Pose and BADJA datasets. Our code is available at the project website.
相關內容
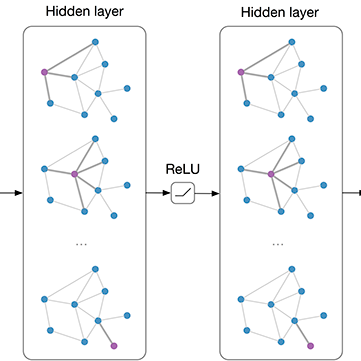
Computational fluid dynamics (CFD) is a valuable tool for personalised, non-invasive evaluation of hemodynamics in arteries, but its complexity and time-consuming nature prohibit large-scale use in practice. Recently, the use of deep learning for rapid estimation of CFD parameters like wall shear stress (WSS) on surface meshes has been investigated. However, existing approaches typically depend on a hand-crafted re-parametrisation of the surface mesh to match convolutional neural network architectures. In this work, we propose to instead use mesh convolutional neural networks that directly operate on the same finite-element surface mesh as used in CFD. We train and evaluate our method on two datasets of synthetic coronary artery models with and without bifurcation, using a ground truth obtained from CFD simulation. We show that our flexible deep learning model can accurately predict 3D WSS vectors on this surface mesh. Our method processes new meshes in less than 5 [s], consistently achieves a normalised mean absolute error of $\leq$ 1.6 [%], and peaks at 90.5 [%] median approximation accuracy over the held-out test set, comparing favourably to previously published work. This demonstrates the feasibility of CFD surrogate modelling using mesh convolutional neural networks for hemodynamic parameter estimation in artery models.
Convolutional neural networks (CNNs) have been widely utilized in many computer vision tasks. However, CNNs have a fixed reception field and lack the ability of long-range perception, which is crucial to human pose estimation. Due to its capability to capture long-range dependencies between pixels, transformer architecture has been adopted to computer vision applications recently and is proven to be a highly effective architecture. We are interested in exploring its capability in human pose estimation, and thus propose a novel model based on transformer architecture, enhanced with a feature pyramid fusion structure. More specifically, we use pre-trained Swin Transformer as our backbone and extract features from input images, we leverage a feature pyramid structure to extract feature maps from different stages. By fusing the features together, our model predicts the keypoint heatmap. The experiment results of our study have demonstrated that the proposed transformer-based model can achieve better performance compared to the state-of-the-art CNN-based models.
Heatmap-based methods dominate in the field of human pose estimation by modelling the output distribution through likelihood heatmaps. In contrast, regression-based methods are more efficient but suffer from inferior performance. In this work, we explore maximum likelihood estimation (MLE) to develop an efficient and effective regression-based methods. From the perspective of MLE, adopting different regression losses is making different assumptions about the output density function. A density function closer to the true distribution leads to a better regression performance. In light of this, we propose a novel regression paradigm with Residual Log-likelihood Estimation (RLE) to capture the underlying output distribution. Concretely, RLE learns the change of the distribution instead of the unreferenced underlying distribution to facilitate the training process. With the proposed reparameterization design, our method is compatible with off-the-shelf flow models. The proposed method is effective, efficient and flexible. We show its potential in various human pose estimation tasks with comprehensive experiments. Compared to the conventional regression paradigm, regression with RLE bring 12.4 mAP improvement on MSCOCO without any test-time overhead. Moreover, for the first time, especially on multi-person pose estimation, our regression method is superior to the heatmap-based methods. Our code is available at //github.com/Jeff-sjtu/res-loglikelihood-regression
We introduce HuMoR: a 3D Human Motion Model for Robust Estimation of temporal pose and shape. Though substantial progress has been made in estimating 3D human motion and shape from dynamic observations, recovering plausible pose sequences in the presence of noise and occlusions remains a challenge. For this purpose, we propose an expressive generative model in the form of a conditional variational autoencoder, which learns a distribution of the change in pose at each step of a motion sequence. Furthermore, we introduce a flexible optimization-based approach that leverages HuMoR as a motion prior to robustly estimate plausible pose and shape from ambiguous observations. Through extensive evaluations, we demonstrate that our model generalizes to diverse motions and body shapes after training on a large motion capture dataset, and enables motion reconstruction from multiple input modalities including 3D keypoints and RGB(-D) videos.
Human pose estimation - the process of recognizing human keypoints in a given image - is one of the most important tasks in computer vision and has a wide range of applications including movement diagnostics, surveillance, or self-driving vehicle. The accuracy of human keypoint prediction is increasingly improved thanks to the burgeoning development of deep learning. Most existing methods solved human pose estimation by generating heatmaps in which the ith heatmap indicates the location confidence of the ith keypoint. In this paper, we introduce novel network structures referred to as multiresolution representation learning for human keypoint prediction. At different resolutions in the learning process, our networks branch off and use extra layers to learn heatmap generation. We firstly consider the architectures for generating the multiresolution heatmaps after obtaining the lowest-resolution feature maps. Our second approach allows learning during the process of feature extraction in which the heatmaps are generated at each resolution of the feature extractor. The first and second approaches are referred to as multi-resolution heatmap learning and multi-resolution feature map learning respectively. Our architectures are simple yet effective, achieving good performance. We conducted experiments on two common benchmarks for human pose estimation: MS-COCO and MPII dataset.
We develop a system for modeling hand-object interactions in 3D from RGB images that show a hand which is holding a novel object from a known category. We design a Convolutional Neural Network (CNN) for Hand-held Object Pose and Shape estimation called HOPS-Net and utilize prior work to estimate the hand pose and configuration. We leverage the insight that information about the hand facilitates object pose and shape estimation by incorporating the hand into both training and inference of the object pose and shape as well as the refinement of the estimated pose. The network is trained on a large synthetic dataset of objects in interaction with a human hand. To bridge the gap between real and synthetic images, we employ an image-to-image translation model (Augmented CycleGAN) that generates realistically textured objects given a synthetic rendering. This provides a scalable way of generating annotated data for training HOPS-Net. Our quantitative experiments show that even noisy hand parameters significantly help object pose and shape estimation. The qualitative experiments show results of pose and shape estimation of objects held by a hand "in the wild".
This work addresses a novel and challenging problem of estimating the full 3D hand shape and pose from a single RGB image. Most current methods in 3D hand analysis from monocular RGB images only focus on estimating the 3D locations of hand keypoints, which cannot fully express the 3D shape of hand. In contrast, we propose a Graph Convolutional Neural Network (Graph CNN) based method to reconstruct a full 3D mesh of hand surface that contains richer information of both 3D hand shape and pose. To train networks with full supervision, we create a large-scale synthetic dataset containing both ground truth 3D meshes and 3D poses. When fine-tuning the networks on real-world datasets without 3D ground truth, we propose a weakly-supervised approach by leveraging the depth map as a weak supervision in training. Through extensive evaluations on our proposed new datasets and two public datasets, we show that our proposed method can produce accurate and reasonable 3D hand mesh, and can achieve superior 3D hand pose estimation accuracy when compared with state-of-the-art methods.
This is an official pytorch implementation of Deep High-Resolution Representation Learning for Human Pose Estimation. In this work, we are interested in the human pose estimation problem with a focus on learning reliable high-resolution representations. Most existing methods recover high-resolution representations from low-resolution representations produced by a high-to-low resolution network. Instead, our proposed network maintains high-resolution representations through the whole process. We start from a high-resolution subnetwork as the first stage, gradually add high-to-low resolution subnetworks one by one to form more stages, and connect the mutli-resolution subnetworks in parallel. We conduct repeated multi-scale fusions such that each of the high-to-low resolution representations receives information from other parallel representations over and over, leading to rich high-resolution representations. As a result, the predicted keypoint heatmap is potentially more accurate and spatially more precise. We empirically demonstrate the effectiveness of our network through the superior pose estimation results over two benchmark datasets: the COCO keypoint detection dataset and the MPII Human Pose dataset. The code and models have been publicly available at \url{//github.com/leoxiaobin/deep-high-resolution-net.pytorch}.
Seam-cutting and seam-driven techniques have been proven effective for handling imperfect image series in image stitching. Generally, seam-driven is to utilize seam-cutting to find a best seam from one or finite alignment hypotheses based on a predefined seam quality metric. However, the quality metrics in most methods are defined to measure the average performance of the pixels on the seam without considering the relevance and variance among them. This may cause that the seam with the minimal measure is not optimal (perception-inconsistent) in human perception. In this paper, we propose a novel coarse-to-fine seam estimation method which applies the evaluation in a different way. For pixels on the seam, we develop a patch-point evaluation algorithm concentrating more on the correlation and variation of them. The evaluations are then used to recalculate the difference map of the overlapping region and reestimate a stitching seam. This evaluation-reestimation procedure iterates until the current seam changes negligibly comparing with the previous seams. Experiments show that our proposed method can finally find a nearly perception-consistent seam after several iterations, which outperforms the conventional seam-cutting and other seam-driven methods.
Detecting objects and estimating their pose remains as one of the major challenges of the computer vision research community. There exists a compromise between localizing the objects and estimating their viewpoints. The detector ideally needs to be view-invariant, while the pose estimation process should be able to generalize towards the category-level. This work is an exploration of using deep learning models for solving both problems simultaneously. For doing so, we propose three novel deep learning architectures, which are able to perform a joint detection and pose estimation, where we gradually decouple the two tasks. We also investigate whether the pose estimation problem should be solved as a classification or regression problem, being this still an open question in the computer vision community. We detail a comparative analysis of all our solutions and the methods that currently define the state of the art for this problem. We use PASCAL3D+ and ObjectNet3D datasets to present the thorough experimental evaluation and main results. With the proposed models we achieve the state-of-the-art performance in both datasets.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191