


Dense video captioning, a task of localizing meaningful moments and generating relevant captions for videos, often requires a large, expensive corpus of annotated video segments paired with text. In an effort to minimize the annotation cost, we propose ZeroTA, a novel method for dense video captioning in a zero-shot manner. Our method does not require any videos or annotations for training; instead, it localizes and describes events within each input video at test time by optimizing solely on the input. This is accomplished by introducing a soft moment mask that represents a temporal segment in the video and jointly optimizing it with the prefix parameters of a language model. This joint optimization aligns a frozen language generation model (i.e., GPT-2) with a frozen vision-language contrastive model (i.e., CLIP) by maximizing the matching score between the generated text and a moment within the video. We also introduce a pairwise temporal IoU loss to let a set of soft moment masks capture multiple distinct events within the video. Our method effectively discovers diverse significant events within the video, with the resulting captions appropriately describing these events. The empirical results demonstrate that ZeroTA surpasses zero-shot baselines and even outperforms the state-of-the-art few-shot method on the widely-used benchmark ActivityNet Captions. Moreover, our method shows greater robustness compared to supervised methods when evaluated in out-of-domain scenarios. This research provides insight into the potential of aligning widely-used models, such as language generation models and vision-language models, to unlock a new capability: understanding temporal aspects of videos.
相關內容
Composed image retrieval, a task involving the search for a target image using a reference image and a complementary text as the query, has witnessed significant advancements owing to the progress made in cross-modal modeling. Unlike the general image-text retrieval problem with only one alignment relation, i.e., image-text, we argue for the existence of two types of relations in composed image retrieval. The explicit relation pertains to the reference image & complementary text-target image, which is commonly exploited by existing methods. Besides this intuitive relation, the observations during our practice have uncovered another implicit yet crucial relation, i.e., reference image & target image-complementary text, since we found that the complementary text can be inferred by studying the relation between the target image and the reference image. Regrettably, existing methods largely focus on leveraging the explicit relation to learn their networks, while overlooking the implicit relation. In response to this weakness, We propose a new framework for composed image retrieval, termed dual relation alignment, which integrates both explicit and implicit relations to fully exploit the correlations among the triplets. Specifically, we design a vision compositor to fuse reference image and target image at first, then the resulted representation will serve two roles: (1) counterpart for semantic alignment with the complementary text and (2) compensation for the complementary text to boost the explicit relation modeling, thereby implant the implicit relation into the alignment learning. Our method is evaluated on two popular datasets, CIRR and FashionIQ, through extensive experiments. The results confirm the effectiveness of our dual-relation learning in substantially enhancing composed image retrieval performance.
Robots must make and break contact to interact with the world and perform useful tasks. However, planning and control through contact remains a formidable challenge. In this work, we achieve real-time contact-implicit model predictive control with a surprisingly simple method: inverse dynamics trajectory optimization. While trajectory optimization with inverse dynamics is not new, we introduce a series of incremental innovations that collectively enable fast model predictive control on a variety of challenging manipulation and locomotion tasks. We implement these innovations in an open-source solver, and present a variety of simulation examples to support the effectiveness of the proposed approach. Additionally, we demonstrate contact-implicit model predictive control on hardware at over 100 Hz for a 20 degree-of-freedom bi-manual manipulation task.
Image fusion aims to generate a high-quality image from multiple images captured under varying conditions. The key problem of this task is to preserve complementary information while filtering out irrelevant information for the fused result. However, existing methods address this problem by leveraging static convolutional neural networks (CNNs), suffering two inherent limitations during feature extraction, i.e., being unable to handle spatial-variant contents and lacking guidance from multiple inputs. In this paper, we propose a novel mutual-guided dynamic network (MGDN) for image fusion, which allows for effective information utilization across different locations and inputs. Specifically, we design a mutual-guided dynamic filter (MGDF) for adaptive feature extraction, composed of a mutual-guided cross-attention (MGCA) module and a dynamic filter predictor, where the former incorporates additional guidance from different inputs and the latter generates spatial-variant kernels for different locations. In addition, we introduce a parallel feature fusion (PFF) module to effectively fuse local and global information of the extracted features. To further reduce the redundancy among the extracted features while simultaneously preserving their shared structural information, we devise a novel loss function that combines the minimization of normalized mutual information (NMI) with an estimated gradient mask. Experimental results on five benchmark datasets demonstrate that our proposed method outperforms existing methods on four image fusion tasks. The code and model are publicly available at: //github.com/Guanys-dar/MGDN.
Despite the recent progress in deep learning, most approaches still go for a silo-like solution, focusing on learning each task in isolation: training a separate neural network for each individual task. Many real-world problems, however, call for a multi-modal approach and, therefore, for multi-tasking models. Multi-task learning (MTL) aims to leverage useful information across tasks to improve the generalization capability of a model. This thesis is concerned with multi-task learning in the context of computer vision. First, we review existing approaches for MTL. Next, we propose several methods that tackle important aspects of multi-task learning. The proposed methods are evaluated on various benchmarks. The results show several advances in the state-of-the-art of multi-task learning. Finally, we discuss several possibilities for future work.
Answering questions that require reading texts in an image is challenging for current models. One key difficulty of this task is that rare, polysemous, and ambiguous words frequently appear in images, e.g., names of places, products, and sports teams. To overcome this difficulty, only resorting to pre-trained word embedding models is far from enough. A desired model should utilize the rich information in multiple modalities of the image to help understand the meaning of scene texts, e.g., the prominent text on a bottle is most likely to be the brand. Following this idea, we propose a novel VQA approach, Multi-Modal Graph Neural Network (MM-GNN). It first represents an image as a graph consisting of three sub-graphs, depicting visual, semantic, and numeric modalities respectively. Then, we introduce three aggregators which guide the message passing from one graph to another to utilize the contexts in various modalities, so as to refine the features of nodes. The updated nodes have better features for the downstream question answering module. Experimental evaluations show that our MM-GNN represents the scene texts better and obviously facilitates the performances on two VQA tasks that require reading scene texts.
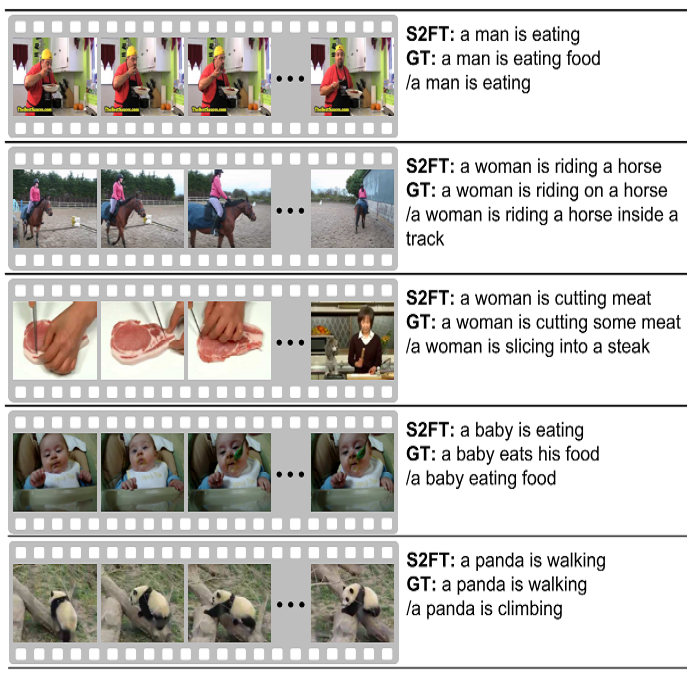
Video captioning is a challenging task that requires a deep understanding of visual scenes. State-of-the-art methods generate captions using either scene-level or object-level information but without explicitly modeling object interactions. Thus, they often fail to make visually grounded predictions, and are sensitive to spurious correlations. In this paper, we propose a novel spatio-temporal graph model for video captioning that exploits object interactions in space and time. Our model builds interpretable links and is able to provide explicit visual grounding. To avoid unstable performance caused by the variable number of objects, we further propose an object-aware knowledge distillation mechanism, in which local object information is used to regularize global scene features. We demonstrate the efficacy of our approach through extensive experiments on two benchmarks, showing our approach yields competitive performance with interpretable predictions.
Knowledge graph embedding, which aims to represent entities and relations as low dimensional vectors (or matrices, tensors, etc.), has been shown to be a powerful technique for predicting missing links in knowledge graphs. Existing knowledge graph embedding models mainly focus on modeling relation patterns such as symmetry/antisymmetry, inversion, and composition. However, many existing approaches fail to model semantic hierarchies, which are common in real-world applications. To address this challenge, we propose a novel knowledge graph embedding model---namely, Hierarchy-Aware Knowledge Graph Embedding (HAKE)---which maps entities into the polar coordinate system. HAKE is inspired by the fact that concentric circles in the polar coordinate system can naturally reflect the hierarchy. Specifically, the radial coordinate aims to model entities at different levels of the hierarchy, and entities with smaller radii are expected to be at higher levels; the angular coordinate aims to distinguish entities at the same level of the hierarchy, and these entities are expected to have roughly the same radii but different angles. Experiments demonstrate that HAKE can effectively model the semantic hierarchies in knowledge graphs, and significantly outperforms existing state-of-the-art methods on benchmark datasets for the link prediction task.
Many tasks in natural language processing can be viewed as multi-label classification problems. However, most of the existing models are trained with the standard cross-entropy loss function and use a fixed prediction policy (e.g., a threshold of 0.5) for all the labels, which completely ignores the complexity and dependencies among different labels. In this paper, we propose a meta-learning method to capture these complex label dependencies. More specifically, our method utilizes a meta-learner to jointly learn the training policies and prediction policies for different labels. The training policies are then used to train the classifier with the cross-entropy loss function, and the prediction policies are further implemented for prediction. Experimental results on fine-grained entity typing and text classification demonstrate that our proposed method can obtain more accurate multi-label classification results.
Dense video captioning aims to generate text descriptions for all events in an untrimmed video. This involves both detecting and describing events. Therefore, all previous methods on dense video captioning tackle this problem by building two models, i.e. an event proposal and a captioning model, for these two sub-problems. The models are either trained separately or in alternation. This prevents direct influence of the language description to the event proposal, which is important for generating accurate descriptions. To address this problem, we propose an end-to-end transformer model for dense video captioning. The encoder encodes the video into appropriate representations. The proposal decoder decodes from the encoding with different anchors to form video event proposals. The captioning decoder employs a masking network to restrict its attention to the proposal event over the encoding feature. This masking network converts the event proposal to a differentiable mask, which ensures the consistency between the proposal and captioning during training. In addition, our model employs a self-attention mechanism, which enables the use of efficient non-recurrent structure during encoding and leads to performance improvements. We demonstrate the effectiveness of this end-to-end model on ActivityNet Captions and YouCookII datasets, where we achieved 10.12 and 6.58 METEOR score, respectively.
Multi-relation Question Answering is a challenging task, due to the requirement of elaborated analysis on questions and reasoning over multiple fact triples in knowledge base. In this paper, we present a novel model called Interpretable Reasoning Network that employs an interpretable, hop-by-hop reasoning process for question answering. The model dynamically decides which part of an input question should be analyzed at each hop; predicts a relation that corresponds to the current parsed results; utilizes the predicted relation to update the question representation and the state of the reasoning process; and then drives the next-hop reasoning. Experiments show that our model yields state-of-the-art results on two datasets. More interestingly, the model can offer traceable and observable intermediate predictions for reasoning analysis and failure diagnosis.
小貼士
登錄享
相關主題

注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191