

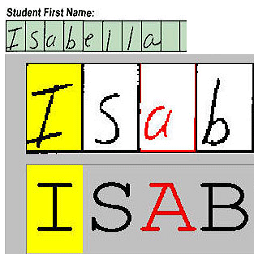
We introduce Augmented Math, a machine learning-based approach to authoring AR explorable explanations by augmenting static math textbooks without programming. To augment a static document, our system first extracts mathematical formulas and figures from a given document using optical character recognition (OCR) and computer vision. By binding and manipulating these extracted contents, the user can see the interactive animation overlaid onto the document through mobile AR interfaces. This empowers non-technical users, such as teachers or students, to transform existing math textbooks and handouts into on-demand and personalized explorable explanations. To design our system, we first analyzed existing explorable math explanations to identify common design strategies. Based on the findings, we developed a set of augmentation techniques that can be automatically generated based on the extracted content, which are 1) dynamic values, 2) interactive figures, 3) relationship highlights, 4) concrete examples, and 5) step-by-step hints. To evaluate our system, we conduct two user studies: preliminary user testing and expert interviews. The study results confirm that our system allows more engaging experiences for learning math concepts.
相關內容
Recent research indicates that the performance of machine learning models can be improved by aligning the geometry of the latent space with the underlying data structure. Rather than relying solely on Euclidean space, researchers have proposed using hyperbolic and spherical spaces with constant curvature, or combinations thereof, to better model the latent space and enhance model performance. However, little attention has been given to the problem of automatically identifying the optimal latent geometry for the downstream task. We mathematically define this novel formulation and coin it as neural latent geometry search (NLGS). More specifically, we introduce a principled method that searches for a latent geometry composed of a product of constant curvature model spaces with minimal query evaluations. To accomplish this, we propose a novel notion of distance between candidate latent geometries based on the Gromov-Hausdorff distance from metric geometry. In order to compute the Gromov-Hausdorff distance, we introduce a mapping function that enables the comparison of different manifolds by embedding them in a common high-dimensional ambient space. Finally, we design a graph search space based on the calculated distances between candidate manifolds and use Bayesian optimization to search for the optimal latent geometry in a query-efficient manner. This is a general method which can be applied to search for the optimal latent geometry for a variety of models and downstream tasks. Extensive experiments on synthetic and real-world datasets confirm the efficacy of our method in identifying the optimal latent geometry for multiple machine learning problems.
Over-the-air federated learning (OTA-FL) integrates communication and model aggregation by exploiting the innate superposition property of wireless channels. The approach renders bandwidth efficient learning, but requires care in handling the wireless physical layer impairments. In this paper, federated edge learning is considered for a network that is heterogeneous with respect to client (edge node) data set distributions and individual client resources, under a general non-convex learning objective. We augment the wireless OTA-FL system with a Reconfigurable Intelligent Surface (RIS) to enable a propagation environment with improved learning performance in a realistic time varying physical layer. Our approach is a cross-layer perspective that jointly optimizes communication, computation and learning resources, in this general heterogeneous setting. We adapt the local computation steps and transmission power of the clients in conjunction with the RIS phase shifts. The resulting joint communication and learning algorithm, RIS-assisted Over-the-air Adaptive Resource Allocation for Federated learning (ROAR-Fed) is shown to be convergent in this general setting. Numerical results demonstrate the effectiveness of ROAR-Fed under heterogeneous (non i.i.d.) data and imperfect CSI, indicating the advantage of RIS assisted learning in this general set up.
Deep learning-based methods have been extensively explored for automatic building mapping from high-resolution remote sensing images over recent years. While most building mapping models produce vector polygons of buildings for geographic and mapping systems, dominant methods typically decompose polygonal building extraction in some sub-problems, including segmentation, polygonization, and regularization, leading to complex inference procedures, low accuracy, and poor generalization. In this paper, we propose a simple and novel building mapping method with Hierarchical Transformers, called HiT, improving polygonal building mapping quality from high-resolution remote sensing images. HiT builds on a two-stage detection architecture by adding a polygon head parallel to classification and bounding box regression heads. HiT simultaneously outputs building bounding boxes and vector polygons, which is fully end-to-end trainable. The polygon head formulates a building polygon as serialized vertices with the bidirectional characteristic, a simple and elegant polygon representation avoiding the start or end vertex hypothesis. Under this new perspective, the polygon head adopts a transformer encoder-decoder architecture to predict serialized vertices supervised by the designed bidirectional polygon loss. Furthermore, a hierarchical attention mechanism combined with convolution operation is introduced in the encoder of the polygon head, providing more geometric structures of building polygons at vertex and edge levels. Comprehensive experiments on two benchmarks (the CrowdAI and Inria datasets) demonstrate that our method achieves a new state-of-the-art in terms of instance segmentation and polygonal metrics compared with state-of-the-art methods. Moreover, qualitative results verify the superiority and effectiveness of our model under complex scenes.
Weakly supervised learning is a popular approach for training machine learning models in low-resource settings. Instead of requesting high-quality yet costly human annotations, it allows training models with noisy annotations obtained from various weak sources. Recently, many sophisticated approaches have been proposed for robust training under label noise, reporting impressive results. In this paper, we revisit the setup of these approaches and find that the benefits brought by these approaches are significantly overestimated. Specifically, we find that the success of existing weakly supervised learning approaches heavily relies on the availability of clean validation samples which, as we show, can be leveraged much more efficiently by simply training on them. After using these clean labels in training, the advantages of using these sophisticated approaches are mostly wiped out. This remains true even when reducing the size of the available clean data to just five samples per class, making these approaches impractical. To understand the true value of weakly supervised learning, we thoroughly analyze diverse NLP datasets and tasks to ascertain when and why weakly supervised approaches work. Based on our findings, we provide recommendations for future research.
The structure learning problem consists of fitting data generated by a Directed Acyclic Graph (DAG) to correctly reconstruct its arcs. In this context, differentiable approaches constrain or regularize the optimization problem using a continuous relaxation of the acyclicity property. The computational cost of evaluating graph acyclicity is cubic on the number of nodes and significantly affects scalability. In this paper we introduce COSMO, a constraint-free continuous optimization scheme for acyclic structure learning. At the core of our method, we define a differentiable approximation of an orientation matrix parameterized by a single priority vector. Differently from previous work, our parameterization fits a smooth orientation matrix and the resulting acyclic adjacency matrix without evaluating acyclicity at any step. Despite the absence of explicit constraints, we prove that COSMO always converges to an acyclic solution. In addition to being asymptotically faster, our empirical analysis highlights how COSMO performance on graph reconstruction compares favorably with competing structure learning methods.
With the breakthrough of AlphaGo, deep reinforcement learning becomes a recognized technique for solving sequential decision-making problems. Despite its reputation, data inefficiency caused by its trial and error learning mechanism makes deep reinforcement learning hard to be practical in a wide range of areas. Plenty of methods have been developed for sample efficient deep reinforcement learning, such as environment modeling, experience transfer, and distributed modifications, amongst which, distributed deep reinforcement learning has shown its potential in various applications, such as human-computer gaming, and intelligent transportation. In this paper, we conclude the state of this exciting field, by comparing the classical distributed deep reinforcement learning methods, and studying important components to achieve efficient distributed learning, covering single player single agent distributed deep reinforcement learning to the most complex multiple players multiple agents distributed deep reinforcement learning. Furthermore, we review recently released toolboxes that help to realize distributed deep reinforcement learning without many modifications of their non-distributed versions. By analyzing their strengths and weaknesses, a multi-player multi-agent distributed deep reinforcement learning toolbox is developed and released, which is further validated on Wargame, a complex environment, showing usability of the proposed toolbox for multiple players and multiple agents distributed deep reinforcement learning under complex games. Finally, we try to point out challenges and future trends, hoping this brief review can provide a guide or a spark for researchers who are interested in distributed deep reinforcement learning.

The existence of representative datasets is a prerequisite of many successful artificial intelligence and machine learning models. However, the subsequent application of these models often involves scenarios that are inadequately represented in the data used for training. The reasons for this are manifold and range from time and cost constraints to ethical considerations. As a consequence, the reliable use of these models, especially in safety-critical applications, is a huge challenge. Leveraging additional, already existing sources of knowledge is key to overcome the limitations of purely data-driven approaches, and eventually to increase the generalization capability of these models. Furthermore, predictions that conform with knowledge are crucial for making trustworthy and safe decisions even in underrepresented scenarios. This work provides an overview of existing techniques and methods in the literature that combine data-based models with existing knowledge. The identified approaches are structured according to the categories integration, extraction and conformity. Special attention is given to applications in the field of autonomous driving.
As an effective strategy, data augmentation (DA) alleviates data scarcity scenarios where deep learning techniques may fail. It is widely applied in computer vision then introduced to natural language processing and achieves improvements in many tasks. One of the main focuses of the DA methods is to improve the diversity of training data, thereby helping the model to better generalize to unseen testing data. In this survey, we frame DA methods into three categories based on the diversity of augmented data, including paraphrasing, noising, and sampling. Our paper sets out to analyze DA methods in detail according to the above categories. Further, we also introduce their applications in NLP tasks as well as the challenges.
Deep learning methods are achieving ever-increasing performance on many artificial intelligence tasks. A major limitation of deep models is that they are not amenable to interpretability. This limitation can be circumvented by developing post hoc techniques to explain the predictions, giving rise to the area of explainability. Recently, explainability of deep models on images and texts has achieved significant progress. In the area of graph data, graph neural networks (GNNs) and their explainability are experiencing rapid developments. However, there is neither a unified treatment of GNN explainability methods, nor a standard benchmark and testbed for evaluations. In this survey, we provide a unified and taxonomic view of current GNN explainability methods. Our unified and taxonomic treatments of this subject shed lights on the commonalities and differences of existing methods and set the stage for further methodological developments. To facilitate evaluations, we generate a set of benchmark graph datasets specifically for GNN explainability. We summarize current datasets and metrics for evaluating GNN explainability. Altogether, this work provides a unified methodological treatment of GNN explainability and a standardized testbed for evaluations.
State-of-the-art Convolutional Neural Network (CNN) benefits a lot from multi-task learning (MTL), which learns multiple related tasks simultaneously to obtain shared or mutually related representations for different tasks. The most widely-used MTL CNN structure is based on an empirical or heuristic split on a specific layer (e.g., the last convolutional layer) to minimize different task-specific losses. However, this heuristic sharing/splitting strategy may be harmful to the final performance of one or multiple tasks. In this paper, we propose a novel CNN structure for MTL, which enables automatic feature fusing at every layer. Specifically, we first concatenate features from different tasks according to their channel dimension, and then formulate the feature fusing problem as discriminative dimensionality reduction. We show that this discriminative dimensionality reduction can be done by 1x1 Convolution, Batch Normalization, and Weight Decay in one CNN, which we refer to as Neural Discriminative Dimensionality Reduction (NDDR). We perform ablation analysis in details for different configurations in training the network. The experiments carried out on different network structures and different task sets demonstrate the promising performance and desirable generalizability of our proposed method.
小貼士
登錄享
相關主題



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191