


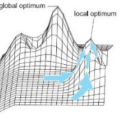
Network-based representations of fitness landscapes have grown in popularity in the past decade; this is probably because of growing interest in explainability for optimisation algorithms. Local optima networks (LONs) have been especially dominant in the literature and capture an approximation of local optima and their connectivity in the landscape. However, thus far, LONs have been constructed according to a strict definition of what a local optimum is: the result of local search. Many evolutionary approaches do not include this, however. Popular algorithms such as CMA-ES have therefore never been subject to LON analysis. Search trajectory networks (STNs) offer a possible alternative: nodes can be any search space location. However, STNs are not typically modelled in such a way that models temporal stalls: that is, a region in the search space where an algorithm fails to find a better solution over a defined period of time. In this work, we approach this by systematically analysing a special case of STN which we name attractor networks. These offer a coarse-grained view of algorithm behaviour with a singular focus on stall locations. We construct attractor networks for CMA-ES, differential evolution, and random search for 24 noiseless black-box optimisation benchmark problems. The properties of attractor networks are systematically explored. They are also visualised and compared to traditional LONs and STN models. We find that attractor networks facilitate insights into algorithm behaviour which other models cannot, and we advocate for the consideration of attractor analysis even for algorithms which do not include local search.
相關內容
In pace with developments in the research field of artificial intelligence, knowledge graphs (KGs) have attracted a surge of interest from both academia and industry. As a representation of semantic relations between entities, KGs have proven to be particularly relevant for natural language processing (NLP), experiencing a rapid spread and wide adoption within recent years. Given the increasing amount of research work in this area, several KG-related approaches have been surveyed in the NLP research community. However, a comprehensive study that categorizes established topics and reviews the maturity of individual research streams remains absent to this day. Contributing to closing this gap, we systematically analyzed 507 papers from the literature on KGs in NLP. Our survey encompasses a multifaceted review of tasks, research types, and contributions. As a result, we present a structured overview of the research landscape, provide a taxonomy of tasks, summarize our findings, and highlight directions for future work.
In contrast to batch learning where all training data is available at once, continual learning represents a family of methods that accumulate knowledge and learn continuously with data available in sequential order. Similar to the human learning process with the ability of learning, fusing, and accumulating new knowledge coming at different time steps, continual learning is considered to have high practical significance. Hence, continual learning has been studied in various artificial intelligence tasks. In this paper, we present a comprehensive review of the recent progress of continual learning in computer vision. In particular, the works are grouped by their representative techniques, including regularization, knowledge distillation, memory, generative replay, parameter isolation, and a combination of the above techniques. For each category of these techniques, both its characteristics and applications in computer vision are presented. At the end of this overview, several subareas, where continuous knowledge accumulation is potentially helpful while continual learning has not been well studied, are discussed.
Deep Learning has implemented a wide range of applications and has become increasingly popular in recent years. The goal of multimodal deep learning is to create models that can process and link information using various modalities. Despite the extensive development made for unimodal learning, it still cannot cover all the aspects of human learning. Multimodal learning helps to understand and analyze better when various senses are engaged in the processing of information. This paper focuses on multiple types of modalities, i.e., image, video, text, audio, body gestures, facial expressions, and physiological signals. Detailed analysis of past and current baseline approaches and an in-depth study of recent advancements in multimodal deep learning applications has been provided. A fine-grained taxonomy of various multimodal deep learning applications is proposed, elaborating on different applications in more depth. Architectures and datasets used in these applications are also discussed, along with their evaluation metrics. Last, main issues are highlighted separately for each domain along with their possible future research directions.
Large knowledge graphs often grow to store temporal facts that model the dynamic relations or interactions of entities along the timeline. Since such temporal knowledge graphs often suffer from incompleteness, it is important to develop time-aware representation learning models that help to infer the missing temporal facts. While the temporal facts are typically evolving, it is observed that many facts often show a repeated pattern along the timeline, such as economic crises and diplomatic activities. This observation indicates that a model could potentially learn much from the known facts appeared in history. To this end, we propose a new representation learning model for temporal knowledge graphs, namely CyGNet, based on a novel timeaware copy-generation mechanism. CyGNet is not only able to predict future facts from the whole entity vocabulary, but also capable of identifying facts with repetition and accordingly predicting such future facts with reference to the known facts in the past. We evaluate the proposed method on the knowledge graph completion task using five benchmark datasets. Extensive experiments demonstrate the effectiveness of CyGNet for predicting future facts with repetition as well as de novo fact prediction.
Classical machine learning implicitly assumes that labels of the training data are sampled from a clean distribution, which can be too restrictive for real-world scenarios. However, statistical learning-based methods may not train deep learning models robustly with these noisy labels. Therefore, it is urgent to design Label-Noise Representation Learning (LNRL) methods for robustly training deep models with noisy labels. To fully understand LNRL, we conduct a survey study. We first clarify a formal definition for LNRL from the perspective of machine learning. Then, via the lens of learning theory and empirical study, we figure out why noisy labels affect deep models' performance. Based on the theoretical guidance, we categorize different LNRL methods into three directions. Under this unified taxonomy, we provide a thorough discussion of the pros and cons of different categories. More importantly, we summarize the essential components of robust LNRL, which can spark new directions. Lastly, we propose possible research directions within LNRL, such as new datasets, instance-dependent LNRL, and adversarial LNRL. Finally, we envision potential directions beyond LNRL, such as learning with feature-noise, preference-noise, domain-noise, similarity-noise, graph-noise, and demonstration-noise.
Since DARPA Grand Challenges (rural) in 2004/05 and Urban Challenges in 2007, autonomous driving has been the most active field of AI applications. Almost at the same time, deep learning has made breakthrough by several pioneers, three of them (also called fathers of deep learning), Hinton, Bengio and LeCun, won ACM Turin Award in 2019. This is a survey of autonomous driving technologies with deep learning methods. We investigate the major fields of self-driving systems, such as perception, mapping and localization, prediction, planning and control, simulation, V2X and safety etc. Due to the limited space, we focus the analysis on several key areas, i.e. 2D and 3D object detection in perception, depth estimation from cameras, multiple sensor fusion on the data, feature and task level respectively, behavior modelling and prediction of vehicle driving and pedestrian trajectories.
Machine learning techniques have deeply rooted in our everyday life. However, since it is knowledge- and labor-intensive to pursue good learning performance, human experts are heavily involved in every aspect of machine learning. In order to make machine learning techniques easier to apply and reduce the demand for experienced human experts, automated machine learning (AutoML) has emerged as a hot topic with both industrial and academic interest. In this paper, we provide an up to date survey on AutoML. First, we introduce and define the AutoML problem, with inspiration from both realms of automation and machine learning. Then, we propose a general AutoML framework that not only covers most existing approaches to date but also can guide the design for new methods. Subsequently, we categorize and review the existing works from two aspects, i.e., the problem setup and the employed techniques. Finally, we provide a detailed analysis of AutoML approaches and explain the reasons underneath their successful applications. We hope this survey can serve as not only an insightful guideline for AutoML beginners but also an inspiration for future research.
We propose a novel attention gate (AG) model for medical imaging that automatically learns to focus on target structures of varying shapes and sizes. Models trained with AGs implicitly learn to suppress irrelevant regions in an input image while highlighting salient features useful for a specific task. This enables us to eliminate the necessity of using explicit external tissue/organ localisation modules of cascaded convolutional neural networks (CNNs). AGs can be easily integrated into standard CNN architectures such as the U-Net model with minimal computational overhead while increasing the model sensitivity and prediction accuracy. The proposed Attention U-Net architecture is evaluated on two large CT abdominal datasets for multi-class image segmentation. Experimental results show that AGs consistently improve the prediction performance of U-Net across different datasets and training sizes while preserving computational efficiency. The code for the proposed architecture is publicly available.
Object detection typically assumes that training and test data are drawn from an identical distribution, which, however, does not always hold in practice. Such a distribution mismatch will lead to a significant performance drop. In this work, we aim to improve the cross-domain robustness of object detection. We tackle the domain shift on two levels: 1) the image-level shift, such as image style, illumination, etc, and 2) the instance-level shift, such as object appearance, size, etc. We build our approach based on the recent state-of-the-art Faster R-CNN model, and design two domain adaptation components, on image level and instance level, to reduce the domain discrepancy. The two domain adaptation components are based on H-divergence theory, and are implemented by learning a domain classifier in adversarial training manner. The domain classifiers on different levels are further reinforced with a consistency regularization to learn a domain-invariant region proposal network (RPN) in the Faster R-CNN model. We evaluate our newly proposed approach using multiple datasets including Cityscapes, KITTI, SIM10K, etc. The results demonstrate the effectiveness of our proposed approach for robust object detection in various domain shift scenarios.
Spectral clustering is a leading and popular technique in unsupervised data analysis. Two of its major limitations are scalability and generalization of the spectral embedding (i.e., out-of-sample-extension). In this paper we introduce a deep learning approach to spectral clustering that overcomes the above shortcomings. Our network, which we call SpectralNet, learns a map that embeds input data points into the eigenspace of their associated graph Laplacian matrix and subsequently clusters them. We train SpectralNet using a procedure that involves constrained stochastic optimization. Stochastic optimization allows it to scale to large datasets, while the constraints, which are implemented using a special-purpose output layer, allow us to keep the network output orthogonal. Moreover, the map learned by SpectralNet naturally generalizes the spectral embedding to unseen data points. To further improve the quality of the clustering, we replace the standard pairwise Gaussian affinities with affinities leaned from unlabeled data using a Siamese network. Additional improvement can be achieved by applying the network to code representations produced, e.g., by standard autoencoders. Our end-to-end learning procedure is fully unsupervised. In addition, we apply VC dimension theory to derive a lower bound on the size of SpectralNet. State-of-the-art clustering results are reported on the Reuters dataset. Our implementation is publicly available at //github.com/kstant0725/SpectralNet .
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191