

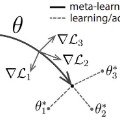
Deep learning models require a large amount of data to perform well. When data is scarce for a target task, we can transfer the knowledge gained by training on similar tasks to quickly learn the target. A successful approach is meta-learning, or "learning to learn" a distribution of tasks, where "learning" is represented by an outer loop, and "to learn" by an inner loop of gradient descent. However, a number of recent empirical studies argue that the inner loop is unnecessary and more simple models work equally well or even better. We study the performance of MAML as a function of the learning rate of the inner loop, where zero learning rate implies that there is no inner loop. Using random matrix theory and exact solutions of linear models, we calculate an algebraic expression for the test loss of MAML applied to mixed linear regression and nonlinear regression with overparameterized models. Surprisingly, while the optimal learning rate for adaptation is positive, we find that the optimal learning rate for training is always negative, a setting that has never been considered before. Therefore, not only does the performance increase by decreasing the learning rate to zero, as suggested by recent work, but it can be increased even further by decreasing the learning rate to negative values. These results help clarify under what circumstances meta-learning performs best.
相關內容
When an agent encounters a continual stream of new tasks in the lifelong learning setting, it leverages the knowledge it gained from the earlier tasks to help learn the new tasks better. In such a scenario, identifying an efficient knowledge representation becomes a challenging problem. Most research works propose to either store a subset of examples from the past tasks in a replay buffer, dedicate a separate set of parameters to each task or penalize excessive updates over parameters by introducing a regularization term. While existing methods employ the general task-agnostic stochastic gradient descent update rule, we propose a task-aware optimizer that adapts the learning rate based on the relatedness among tasks. We utilize the directions taken by the parameters during the updates by accumulating the gradients specific to each task. These task-based accumulated gradients act as a knowledge base that is maintained and updated throughout the stream. We empirically show that our proposed adaptive learning rate not only accounts for catastrophic forgetting but also allows positive backward transfer. We also show that our method performs better than several state-of-the-art methods in lifelong learning on complex datasets with a large number of tasks.
We consider the question: how can you sample good negative examples for contrastive learning? We argue that, as with metric learning, learning contrastive representations benefits from hard negative samples (i.e., points that are difficult to distinguish from an anchor point). The key challenge toward using hard negatives is that contrastive methods must remain unsupervised, making it infeasible to adopt existing negative sampling strategies that use label information. In response, we develop a new class of unsupervised methods for selecting hard negative samples where the user can control the amount of hardness. A limiting case of this sampling results in a representation that tightly clusters each class, and pushes different classes as far apart as possible. The proposed method improves downstream performance across multiple modalities, requires only few additional lines of code to implement, and introduces no computational overhead.
Meta-reinforcement learning (meta-RL) aims to learn from multiple training tasks the ability to adapt efficiently to unseen test tasks. Despite the success, existing meta-RL algorithms are known to be sensitive to the task distribution shift. When the test task distribution is different from the training task distribution, the performance may degrade significantly. To address this issue, this paper proposes Model-based Adversarial Meta-Reinforcement Learning (AdMRL), where we aim to minimize the worst-case sub-optimality gap -- the difference between the optimal return and the return that the algorithm achieves after adaptation -- across all tasks in a family of tasks, with a model-based approach. We propose a minimax objective and optimize it by alternating between learning the dynamics model on a fixed task and finding the adversarial task for the current model -- the task for which the policy induced by the model is maximally suboptimal. Assuming the family of tasks is parameterized, we derive a formula for the gradient of the suboptimality with respect to the task parameters via the implicit function theorem, and show how the gradient estimator can be efficiently implemented by the conjugate gradient method and a novel use of the REINFORCE estimator. We evaluate our approach on several continuous control benchmarks and demonstrate its efficacy in the worst-case performance over all tasks, the generalization power to out-of-distribution tasks, and in training and test time sample efficiency, over existing state-of-the-art meta-RL algorithms.
Clustering is one of the most fundamental and wide-spread techniques in exploratory data analysis. Yet, the basic approach to clustering has not really changed: a practitioner hand-picks a task-specific clustering loss to optimize and fit the given data to reveal the underlying cluster structure. Some types of losses---such as k-means, or its non-linear version: kernelized k-means (centroid based), and DBSCAN (density based)---are popular choices due to their good empirical performance on a range of applications. Although every so often the clustering output using these standard losses fails to reveal the underlying structure, and the practitioner has to custom-design their own variation. In this work we take an intrinsically different approach to clustering: rather than fitting a dataset to a specific clustering loss, we train a recurrent model that learns how to cluster. The model uses as training pairs examples of datasets (as input) and its corresponding cluster identities (as output). By providing multiple types of training datasets as inputs, our model has the ability to generalize well on unseen datasets (new clustering tasks). Our experiments reveal that by training on simple synthetically generated datasets or on existing real datasets, we can achieve better clustering performance on unseen real-world datasets when compared with standard benchmark clustering techniques. Our meta clustering model works well even for small datasets where the usual deep learning models tend to perform worse.
Distance metric learning based on triplet loss has been applied with success in a wide range of applications such as face recognition, image retrieval, speaker change detection and recently recommendation with the CML model. However, as we show in this article, CML requires large batches to work reasonably well because of a too simplistic uniform negative sampling strategy for selecting triplets. Due to memory limitations, this makes it difficult to scale in high-dimensional scenarios. To alleviate this problem, we propose here a 2-stage negative sampling strategy which finds triplets that are highly informative for learning. Our strategy allows CML to work effectively in terms of accuracy and popularity bias, even when the batch size is an order of magnitude smaller than what would be needed with the default uniform sampling. We demonstrate the suitability of the proposed strategy for recommendation and exhibit consistent positive results across various datasets.
A core capability of intelligent systems is the ability to quickly learn new tasks by drawing on prior experience. Gradient (or optimization) based meta-learning has recently emerged as an effective approach for few-shot learning. In this formulation, meta-parameters are learned in the outer loop, while task-specific models are learned in the inner-loop, by using only a small amount of data from the current task. A key challenge in scaling these approaches is the need to differentiate through the inner loop learning process, which can impose considerable computational and memory burdens. By drawing upon implicit differentiation, we develop the implicit MAML algorithm, which depends only on the solution to the inner level optimization and not the path taken by the inner loop optimizer. This effectively decouples the meta-gradient computation from the choice of inner loop optimizer. As a result, our approach is agnostic to the choice of inner loop optimizer and can gracefully handle many gradient steps without vanishing gradients or memory constraints. Theoretically, we prove that implicit MAML can compute accurate meta-gradients with a memory footprint that is, up to small constant factors, no more than that which is required to compute a single inner loop gradient and at no overall increase in the total computational cost. Experimentally, we show that these benefits of implicit MAML translate into empirical gains on few-shot image recognition benchmarks.
Learning to classify unseen class samples at test time is popularly referred to as zero-shot learning (ZSL). If test samples can be from training (seen) as well as unseen classes, it is a more challenging problem due to the existence of strong bias towards seen classes. This problem is generally known as \emph{generalized} zero-shot learning (GZSL). Thanks to the recent advances in generative models such as VAEs and GANs, sample synthesis based approaches have gained considerable attention for solving this problem. These approaches are able to handle the problem of class bias by synthesizing unseen class samples. However, these ZSL/GZSL models suffer due to the following key limitations: $(i)$ Their training stage learns a class-conditioned generator using only \emph{seen} class data and the training stage does not \emph{explicitly} learn to generate the unseen class samples; $(ii)$ They do not learn a generic optimal parameter which can easily generalize for both seen and unseen class generation; and $(iii)$ If we only have access to a very few samples per seen class, these models tend to perform poorly. In this paper, we propose a meta-learning based generative model that naturally handles these limitations. The proposed model is based on integrating model-agnostic meta learning with a Wasserstein GAN (WGAN) to handle $(i)$ and $(iii)$, and uses a novel task distribution to handle $(ii)$. Our proposed model yields significant improvements on standard ZSL as well as more challenging GZSL setting. In ZSL setting, our model yields 4.5\%, 6.0\%, 9.8\%, and 27.9\% relative improvements over the current state-of-the-art on CUB, AWA1, AWA2, and aPY datasets, respectively.
Few-shot Learning aims to learn classifiers for new classes with only a few training examples per class. Existing meta-learning or metric-learning based few-shot learning approaches are limited in handling diverse domains with various number of labels. The meta-learning approaches train a meta learner to predict weights of homogeneous-structured task-specific networks, requiring a uniform number of classes across tasks. The metric-learning approaches learn one task-invariant metric for all the tasks, and they fail if the tasks diverge. We propose to deal with these limitations with meta metric learning. Our meta metric learning approach consists of task-specific learners, that exploit metric learning to handle flexible labels, and a meta learner, that discovers good parameters and gradient decent to specify the metrics in task-specific learners. Thus the proposed model is able to handle unbalanced classes as well as to generate task-specific metrics. We test our approach in the `$k$-shot $N$-way' few-shot learning setting used in previous work and new realistic few-shot setting with diverse multi-domain tasks and flexible label numbers. Experiments show that our approach attains superior performances in both settings.
Recent studies have shown the vulnerability of reinforcement learning (RL) models in noisy settings. The sources of noises differ across scenarios. For instance, in practice, the observed reward channel is often subject to noise (e.g., when observed rewards are collected through sensors), and thus observed rewards may not be credible as a result. Also, in applications such as robotics, a deep reinforcement learning (DRL) algorithm can be manipulated to produce arbitrary errors. In this paper, we consider noisy RL problems where observed rewards by RL agents are generated with a reward confusion matrix. We call such observed rewards as perturbed rewards. We develop an unbiased reward estimator aided robust RL framework that enables RL agents to learn in noisy environments while observing only perturbed rewards. Our framework draws upon approaches for supervised learning with noisy data. The core ideas of our solution include estimating a reward confusion matrix and defining a set of unbiased surrogate rewards. We prove the convergence and sample complexity of our approach. Extensive experiments on different DRL platforms show that policies based on our estimated surrogate reward can achieve higher expected rewards, and converge faster than existing baselines. For instance, the state-of-the-art PPO algorithm is able to obtain 67.5% and 46.7% improvements in average on five Atari games, when the error rates are 10% and 30% respectively.
Although reinforcement learning methods can achieve impressive results in simulation, the real world presents two major challenges: generating samples is exceedingly expensive, and unexpected perturbations can cause proficient but narrowly-learned policies to fail at test time. In this work, we propose to learn how to quickly and effectively adapt online to new situations as well as to perturbations. To enable sample-efficient meta-learning, we consider learning online adaptation in the context of model-based reinforcement learning. Our approach trains a global model such that, when combined with recent data, the model can be be rapidly adapted to the local context. Our experiments demonstrate that our approach can enable simulated agents to adapt their behavior online to novel terrains, to a crippled leg, and in highly-dynamic environments.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191