
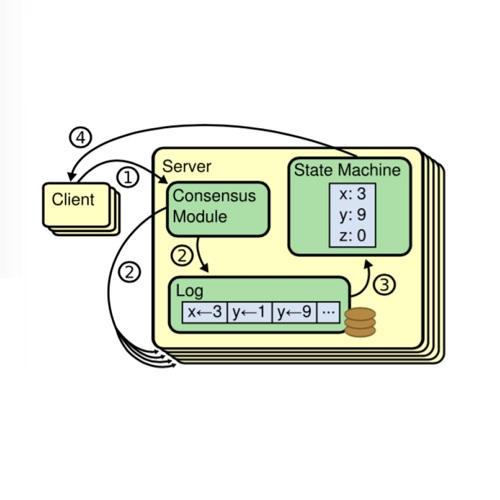

In this paper, we introduce a novel adaptation of the Raft consensus algorithm for achieving emergent formation control in multi-agent systems with a single integrator dynamics. This strategy, dubbed "Rafting," enables robust cooperation between distributed nodes, thereby facilitating the achievement of desired geometric configurations. Our framework takes advantage of the Raft algorithm's inherent fault tolerance and strong consistency guarantees to extend its applicability to distributed formation control tasks. Following the introduction of a decentralized mechanism for aggregating agent states, a synchronization protocol for information exchange and consensus formation is proposed. The Raft consensus algorithm combines leader election, log replication, and state machine application to steer agents toward a common, collaborative goal. A series of detailed simulations validate the efficacy and robustness of our method under various conditions, including partial network failures and disturbances. The outcomes demonstrate the algorithm's potential and open up new possibilities in swarm robotics, autonomous transportation, and distributed computation. The implementation of the algorithms presented in this paper is available at //github.com/abbas-tari/raft.git.
相關內容
Large Language Models (LLMs) have the ability to solve a variety of tasks, such as text summarization and mathematical questions, just out of the box, but they are often trained with a single task in mind. Due to high computational costs, the current trend is to use prompt instruction tuning to better adjust monolithic, pretrained LLMs for new -- but often individual -- downstream tasks. Thus, how one would expand prompt tuning to handle -- concomitantly -- heterogeneous tasks and data distributions is a widely open question. To address this gap, we suggest the use of \emph{Mixture of Prompts}, or MoPs, associated with smart gating functionality: the latter -- whose design is one of the contributions of this paper -- can identify relevant skills embedded in different groups of prompts and dynamically assign combined experts (i.e., collection of prompts), based on the target task. Additionally, MoPs are empirically agnostic to any model compression technique applied -- for efficiency reasons -- as well as instruction data source and task composition. In practice, MoPs can simultaneously mitigate prompt training "interference" in multi-task, multi-source scenarios (e.g., task and data heterogeneity across sources), as well as possible implications from model approximations. As a highlight, MoPs manage to decrease final perplexity from $\sim20\%$ up to $\sim70\%$, as compared to baselines, in the federated scenario, and from $\sim 3\%$ up to $\sim30\%$ in the centralized scenario.
In this paper, we propose a method to estimate the exact location of a camera in a cyber-physical system using the exact geographic coordinates of four feature points stored in QR codes(Quick response codes) and the pixel coordinates of four feature points analyzed from the QR code images taken by the camera. Firstly, the P4P(Perspective 4 Points) algorithm is designed to uniquely determine the initial pose estimation value of the QR coordinate system relative to the camera coordinate system by using the four feature points of the selected QR code. In the second step, the manifold gradient optimization algorithm is designed. The rotation matrix and displacement vector are taken as the initial values of iteration, and the iterative optimization is carried out to improve the positioning accuracy and obtain the rotation matrix and displacement vector with higher accuracy. The third step is to convert the pose of the QR coordinate system with respect to the camera coordinate system to the pose of the AGV(Automated Guided Vehicle) with respect to the world coordinate system. Finally, the performance of manifold gradient optimization algorithm and P4P analytical algorithm are simulated and compared under the same conditions.One can see that the performance of the manifold gradient optimization algorithm proposed in this paper is much better than that of the P4P analytic algorithm when the signal-to-noise ratio is small.With the increase of the signal-to-noise ratio,the performance of the P4P analytic algorithm approaches that of the manifold gradient optimization algorithm.when the noise is same,the performance of manifold gradient optimization algorithm is better when there are more feature points.
In this paper, we propose ``SimVLG'', a streamlined framework for the pre-training of computationally intensive vision-language generative models, leveraging frozen pre-trained large language models (LLMs). The prevailing paradigm in vision-language pre-training (VLP) typically involves a two-stage optimization process: an initial resource-intensive phase dedicated to general-purpose vision-language representation learning, aimed at extracting and consolidating pertinent visual features, followed by a subsequent phase focusing on end-to-end alignment between visual and linguistic modalities. Our one-stage, single-loss framework circumvents the aforementioned computationally demanding first stage of training by gradually merging similar visual tokens during training. This gradual merging process effectively compacts the visual information while preserving the richness of semantic content, leading to fast convergence without sacrificing performance. Our experiments show that our approach can speed up the training of vision-language models by a factor $\times 5$ without noticeable impact on the overall performance. Additionally, we show that our models can achieve comparable performance to current vision-language models with only $1/10$ of the data. Finally, we demonstrate how our image-text models can be easily adapted to video-language generative tasks through a novel soft attentive temporal token merging modules.
Markov Decision Processes (MDPs) are a formal framework for modeling and solving sequential decision-making problems. In finite-time horizons such problems are relevant for instance for optimal stopping or specific supply chain problems, but also in the training of large language models. In contrast to infinite horizon MDPs optimal policies are not stationary, policies must be learned for every single epoch. In practice all parameters are often trained simultaneously, ignoring the inherent structure suggested by dynamic programming. This paper introduces a combination of dynamic programming and policy gradient called dynamic policy gradient, where the parameters are trained backwards in time. For the tabular softmax parametrisation we carry out the convergence analysis for simultaneous and dynamic policy gradient towards global optima, both in the exact and sampled gradient settings without regularisation. It turns out that the use of dynamic policy gradient training much better exploits the structure of finite-time problems which is reflected in improved convergence bounds.
When Large Language Models Meet Personalization: Perspectives of Challenges and Opportunities
The advent of large language models marks a revolutionary breakthrough in artificial intelligence. With the unprecedented scale of training and model parameters, the capability of large language models has been dramatically improved, leading to human-like performances in understanding, language synthesizing, and common-sense reasoning, etc. Such a major leap-forward in general AI capacity will change the pattern of how personalization is conducted. For one thing, it will reform the way of interaction between humans and personalization systems. Instead of being a passive medium of information filtering, large language models present the foundation for active user engagement. On top of such a new foundation, user requests can be proactively explored, and user's required information can be delivered in a natural and explainable way. For another thing, it will also considerably expand the scope of personalization, making it grow from the sole function of collecting personalized information to the compound function of providing personalized services. By leveraging large language models as general-purpose interface, the personalization systems may compile user requests into plans, calls the functions of external tools to execute the plans, and integrate the tools' outputs to complete the end-to-end personalization tasks. Today, large language models are still being developed, whereas the application in personalization is largely unexplored. Therefore, we consider it to be the right time to review the challenges in personalization and the opportunities to address them with LLMs. In particular, we dedicate this perspective paper to the discussion of the following aspects: the development and challenges for the existing personalization system, the newly emerged capabilities of large language models, and the potential ways of making use of large language models for personalization.
As soon as abstract mathematical computations were adapted to computation on digital computers, the problem of efficient representation, manipulation, and communication of the numerical values in those computations arose. Strongly related to the problem of numerical representation is the problem of quantization: in what manner should a set of continuous real-valued numbers be distributed over a fixed discrete set of numbers to minimize the number of bits required and also to maximize the accuracy of the attendant computations? This perennial problem of quantization is particularly relevant whenever memory and/or computational resources are severely restricted, and it has come to the forefront in recent years due to the remarkable performance of Neural Network models in computer vision, natural language processing, and related areas. Moving from floating-point representations to low-precision fixed integer values represented in four bits or less holds the potential to reduce the memory footprint and latency by a factor of 16x; and, in fact, reductions of 4x to 8x are often realized in practice in these applications. Thus, it is not surprising that quantization has emerged recently as an important and very active sub-area of research in the efficient implementation of computations associated with Neural Networks. In this article, we survey approaches to the problem of quantizing the numerical values in deep Neural Network computations, covering the advantages/disadvantages of current methods. With this survey and its organization, we hope to have presented a useful snapshot of the current research in quantization for Neural Networks and to have given an intelligent organization to ease the evaluation of future research in this area.
In this paper, we propose a novel Feature Decomposition and Reconstruction Learning (FDRL) method for effective facial expression recognition. We view the expression information as the combination of the shared information (expression similarities) across different expressions and the unique information (expression-specific variations) for each expression. More specifically, FDRL mainly consists of two crucial networks: a Feature Decomposition Network (FDN) and a Feature Reconstruction Network (FRN). In particular, FDN first decomposes the basic features extracted from a backbone network into a set of facial action-aware latent features to model expression similarities. Then, FRN captures the intra-feature and inter-feature relationships for latent features to characterize expression-specific variations, and reconstructs the expression feature. To this end, two modules including an intra-feature relation modeling module and an inter-feature relation modeling module are developed in FRN. Experimental results on both the in-the-lab databases (including CK+, MMI, and Oulu-CASIA) and the in-the-wild databases (including RAF-DB and SFEW) show that the proposed FDRL method consistently achieves higher recognition accuracy than several state-of-the-art methods. This clearly highlights the benefit of feature decomposition and reconstruction for classifying expressions.
We study the problem of efficient semantic segmentation for large-scale 3D point clouds. By relying on expensive sampling techniques or computationally heavy pre/post-processing steps, most existing approaches are only able to be trained and operate over small-scale point clouds. In this paper, we introduce RandLA-Net, an efficient and lightweight neural architecture to directly infer per-point semantics for large-scale point clouds. The key to our approach is to use random point sampling instead of more complex point selection approaches. Although remarkably computation and memory efficient, random sampling can discard key features by chance. To overcome this, we introduce a novel local feature aggregation module to progressively increase the receptive field for each 3D point, thereby effectively preserving geometric details. Extensive experiments show that our RandLA-Net can process 1 million points in a single pass with up to 200X faster than existing approaches. Moreover, our RandLA-Net clearly surpasses state-of-the-art approaches for semantic segmentation on two large-scale benchmarks Semantic3D and SemanticKITTI.
In this paper, we introduce the Reinforced Mnemonic Reader for machine reading comprehension tasks, which enhances previous attentive readers in two aspects. First, a reattention mechanism is proposed to refine current attentions by directly accessing to past attentions that are temporally memorized in a multi-round alignment architecture, so as to avoid the problems of attention redundancy and attention deficiency. Second, a new optimization approach, called dynamic-critical reinforcement learning, is introduced to extend the standard supervised method. It always encourages to predict a more acceptable answer so as to address the convergence suppression problem occurred in traditional reinforcement learning algorithms. Extensive experiments on the Stanford Question Answering Dataset (SQuAD) show that our model achieves state-of-the-art results. Meanwhile, our model outperforms previous systems by over 6% in terms of both Exact Match and F1 metrics on two adversarial SQuAD datasets.
We study the problem of learning to reason in large scale knowledge graphs (KGs). More specifically, we describe a novel reinforcement learning framework for learning multi-hop relational paths: we use a policy-based agent with continuous states based on knowledge graph embeddings, which reasons in a KG vector space by sampling the most promising relation to extend its path. In contrast to prior work, our approach includes a reward function that takes the accuracy, diversity, and efficiency into consideration. Experimentally, we show that our proposed method outperforms a path-ranking based algorithm and knowledge graph embedding methods on Freebase and Never-Ending Language Learning datasets.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191