


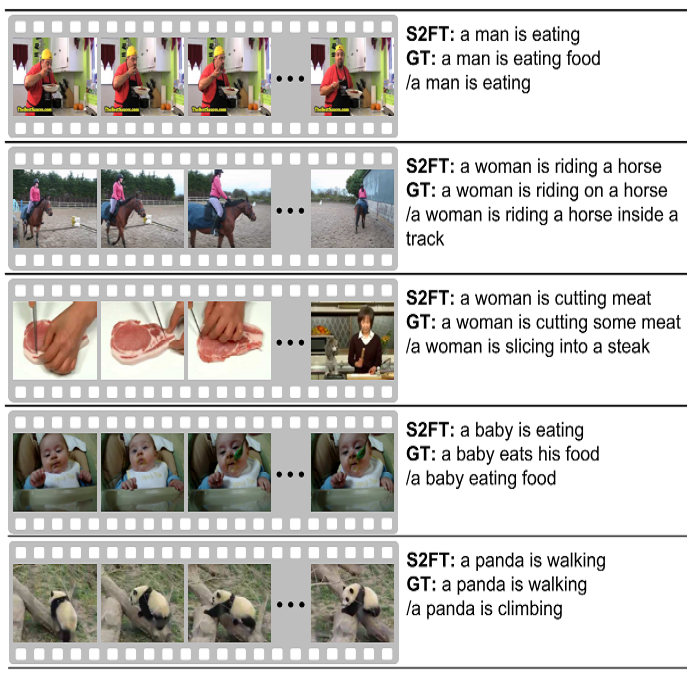
To realize human-robot collaboration, robots need to execute actions for new tasks according to human instructions given finite prior knowledge. Human experts can share their knowledge of how to perform a task with a robot through multi-modal instructions in their demonstrations, showing a sequence of short-horizon steps to achieve a long-horizon goal. This paper introduces a method for robot action sequence generation from instruction videos using (1) an audio-visual Transformer that converts audio-visual features and instruction speech to a sequence of robot actions called dynamic movement primitives (DMPs) and (2) style-transfer-based training that employs multi-task learning with video captioning and weakly-supervised learning with a semantic classifier to exploit unpaired video-action data. We built a system that accomplishes various cooking actions, where an arm robot executes a DMP sequence acquired from a cooking video using the audio-visual Transformer. Experiments with Epic-Kitchen-100, YouCookII, QuerYD, and in-house instruction video datasets show that the proposed method improves the quality of DMP sequences by 2.3 times the METEOR score obtained with a baseline video-to-action Transformer. The model achieved 32% of the task success rate with the task knowledge of the object.
相關內容
機(ji)器(qi)(qi)人(ren)(ren)(英(ying)語:Robot)包括一切模擬人(ren)(ren)類行為或思想與模擬其他生物的機(ji)械(如機(ji)器(qi)(qi)狗,機(ji)器(qi)(qi)貓等)。狹(xia)義上對機(ji)器(qi)(qi)人(ren)(ren)的定義還(huan)有很多分(fen)類法及爭議,有些電腦程序甚至也被(bei)稱為機(ji)器(qi)(qi)人(ren)(ren)。在當代(dai)工業中,機(ji)器(qi)(qi)人(ren)(ren)指(zhi)能自動運行任務的人(ren)(ren)造機(ji)器(qi)(qi)設(she)(she)備,用(yong)以取代(dai)或協助人(ren)(ren)類工作,一般會是機(ji)電設(she)(she)備,由計算(suan)機(ji)程序或是電子電路控制。
Parallel robots (PRs) offer the potential for safe human-robot collaboration because of their low moving masses. Due to the in-parallel kinematic chains, the risk of contact in the form of collisions and clamping at a chain increases. Ensuring safety is investigated in this work through various contact reactions on a real planar PR. External forces are estimated based on proprioceptive information and a dynamics model, which allows contact detection. Retraction along the direction of the estimated line of action provides an instantaneous response to limit the occurring contact forces within the experiment to 70N at a maximum velocity 0.4m/s. A reduction in the stiffness of a Cartesian impedance control is investigated as a further strategy. For clamping, a feedforward neural network (FNN) is trained and tested in different joint angle configurations to classify whether a collision or clamping occurs with an accuracy of 80%. A second FNN classifies the clamping kinematic chain to enable a subsequent kinematic projection of the clamping joint angle onto the rotational platform coordinates. In this way, a structure opening is performed in addition to the softer retraction movement. The reaction strategies are compared in real-world experiments at different velocities and controller stiffnesses to demonstrate their effectiveness. The results show that in all collision and clamping experiments the PR terminates the contact in less than 130ms.
Parallel robots provide the potential to be leveraged for human-robot collaboration (HRC) due to low collision energies even at high speeds resulting from their reduced moving masses. However, the risk of unintended contact with the leg chains increases compared to the structure of serial robots. As a first step towards HRC, contact cases on the whole parallel robot structure are investigated and a disturbance observer based on generalized momenta and measurements of motor current is applied. In addition, a Kalman filter and a second-order sliding-mode observer based on generalized momenta are compared in terms of error and detection time. Gearless direct drives with low friction improve external force estimation and enable low impedance. The experimental validation is performed with two force-torque sensors and a kinetostatic model. This allows a new identification method of the motor torque constant of an assembled parallel robot to estimate external forces from the motor current and via a dynamics model. A Cartesian impedance control scheme for compliant robot-environmental dynamics with stiffness from 0.1-2N/mm and the force observation for low forces over the entire structure are validated. The observers are used for collisions and clamping at velocities of 0.4-0.9m/s for detection within 9-58ms and a reaction in the form of a zero-g mode.
Despite impressive performance for high-level downstream tasks, self-supervised pre-training methods have not yet fully delivered on dense geometric vision tasks such as stereo matching or optical flow. The application of self-supervised concepts, such as instance discrimination or masked image modeling, to geometric tasks is an active area of research. In this work, we build on the recent cross-view completion framework, a variation of masked image modeling that leverages a second view from the same scene which makes it well suited for binocular downstream tasks. The applicability of this concept has so far been limited in at least two ways: (a) by the difficulty of collecting real-world image pairs -- in practice only synthetic data have been used -- and (b) by the lack of generalization of vanilla transformers to dense downstream tasks for which relative position is more meaningful than absolute position. We explore three avenues of improvement. First, we introduce a method to collect suitable real-world image pairs at large scale. Second, we experiment with relative positional embeddings and show that they enable vision transformers to perform substantially better. Third, we scale up vision transformer based cross-completion architectures, which is made possible by the use of large amounts of data. With these improvements, we show for the first time that state-of-the-art results on stereo matching and optical flow can be reached without using any classical task-specific techniques like correlation volume, iterative estimation, image warping or multi-scale reasoning, thus paving the way towards universal vision models.
Role-playing chatbots built on large language models have drawn interest, but better techniques are needed to enable mimicking specific fictional characters. We propose an algorithm that controls language models via an improved prompt and memories of the character extracted from scripts. We construct ChatHaruhi, a dataset covering 32 Chinese / English TV / anime characters with over 54k simulated dialogues. Both automatic and human evaluations show our approach improves role-playing ability over baselines. Code and data are available at //github.com/LC1332/Chat-Haruhi-Suzumiya .
The rapid expansion of foundation pre-trained models and their fine-tuned counterparts has significantly contributed to the advancement of machine learning. Leveraging pre-trained models to extract knowledge and expedite learning in real-world tasks, known as "Model Reuse", has become crucial in various applications. Previous research focuses on reusing models within a certain aspect, including reusing model weights, structures, and hypothesis spaces. This paper introduces ZhiJian, a comprehensive and user-friendly toolbox for model reuse, utilizing the PyTorch backend. ZhiJian presents a novel paradigm that unifies diverse perspectives on model reuse, encompassing target architecture construction with PTM, tuning target model with PTM, and PTM-based inference. This empowers deep learning practitioners to explore downstream tasks and identify the complementary advantages among different methods. ZhiJian is readily accessible at //github.com/zhangyikaii/lamda-zhijian facilitating seamless utilization of pre-trained models and streamlining the model reuse process for researchers and developers.
Accurate pedestrian trajectory prediction is of great importance for downstream tasks such as autonomous driving and mobile robot navigation. Fully investigating the social interactions within the crowd is crucial for accurate pedestrian trajectory prediction. However, most existing methods do not capture group level interactions well, focusing only on pairwise interactions and neglecting group-wise interactions. In this work, we propose a hierarchical graph convolutional network, HGCN-GJS, for trajectory prediction which well leverages group level interactions within the crowd. Furthermore, we introduce a novel joint sampling scheme for modeling the joint distribution of multiple pedestrians in the future trajectories. Based on the group information, this scheme associates the trajectory of one person with the trajectory of other people in the group, but maintains the independence of the trajectories of outsiders. We demonstrate the performance of our network on several trajectory prediction datasets, achieving state-of-the-art results on all datasets considered.
Language models have been shown to perform better with an increase in scale on a wide variety of tasks via the in-context learning paradigm. In this paper, we investigate the hypothesis that the ability of a large language model to in-context learn-perform a task is not uniformly spread across all of its underlying components. Using a 66 billion parameter language model (OPT-66B) across a diverse set of 14 downstream tasks, we find this is indeed the case: $\sim$70% of attention heads and $\sim$20% of feed forward networks can be removed with minimal decline in task performance. We find substantial overlap in the set of attention heads (un)important for in-context learning across tasks and number of in-context examples. We also address our hypothesis through a task-agnostic lens, finding that a small set of attention heads in OPT-66B score highly on their ability to perform primitive induction operations associated with in-context learning, namely, prefix matching and copying. These induction heads overlap with task-specific important heads, reinforcing arguments by Olsson et al. (arXiv:2209.11895) regarding induction head generality to more sophisticated behaviors associated with in-context learning. Overall, our study provides several insights that indicate large language models may be under-trained for in-context learning and opens up questions on how to pre-train language models to more effectively perform in-context learning.
Diffusion probabilistic models (DPMs) are a powerful class of generative models known for their ability to generate high-fidelity image samples. A major challenge in the implementation of DPMs is the slow sampling process. In this work, we bring a high-efficiency sampler for DPMs. Specifically, we propose a score-based exact solution paradigm for the diffusion ODEs corresponding to the sampling process of DPMs, which introduces a new perspective on developing numerical algorithms for solving diffusion ODEs. To achieve an efficient sampler, we propose a recursive derivative estimation (RDE) method to reduce the estimation error. With our proposed solution paradigm and RDE method, we propose the score-integrand solver with the convergence order guarantee as efficient solver (SciRE-Solver) for solving diffusion ODEs. The SciRE-Solver attains state-of-the-art (SOTA) sampling performance with a limited number of score function evaluations (NFE) on both discrete-time and continuous-time DPMs in comparison to existing training-free sampling algorithms. Such as, we achieve $3.48$ FID with $12$ NFE and $2.42$ FID with $20$ NFE for continuous-time DPMs on CIFAR10, respectively. Different from other samplers, SciRE-Solver has the promising potential to surpass the FIDs achieved in the original papers of some pre-trained models with a small NFEs. For example, we reach SOTA value of $2.40$ FID with $100$ NFE for continuous-time DPM and of $3.15$ FID with $84$ NFE for discrete-time DPM on CIFAR-10, as well as of $2.17$ ($2.02$) FID with $18$ ($50$) NFE for discrete-time DPM on CelebA 64$\times$64.
The performance of robots in high-level tasks depends on the quality of their lower-level controller, which requires fine-tuning. However, the intrinsically nonlinear dynamics and controllers make tuning a challenging task when it is done by hand. In this paper, we present DiffTune, a novel, gradient-based automatic tuning framework. We formulate the controller tuning as a parameter optimization problem. Our method unrolls the dynamical system and controller as a computational graph and updates the controller parameters through gradient-based optimization. The gradient is obtained using sensitivity propagation, which is the only method for gradient computation when tuning for a physical system instead of its simulated counterpart. Furthermore, we use $\mathcal{L}_1$ adaptive control to compensate for the uncertainties (that unavoidably exist in a physical system) such that the gradient is not biased by the unmodelled uncertainties. We validate the DiffTune on a Dubin's car and a quadrotor in challenging simulation environments. In comparison with state-of-the-art auto-tuning methods, DiffTune achieves the best performance in a more efficient manner owing to its effective usage of the first-order information of the system. Experiments on tuning a nonlinear controller for quadrotor show promising results, where DiffTune achieves 3.5x tracking error reduction on an aggressive trajectory in only 10 trials over a 12-dimensional controller parameter space.
Most object recognition approaches predominantly focus on learning discriminative visual patterns while overlooking the holistic object structure. Though important, structure modeling usually requires significant manual annotations and therefore is labor-intensive. In this paper, we propose to "look into object" (explicitly yet intrinsically model the object structure) through incorporating self-supervisions into the traditional framework. We show the recognition backbone can be substantially enhanced for more robust representation learning, without any cost of extra annotation and inference speed. Specifically, we first propose an object-extent learning module for localizing the object according to the visual patterns shared among the instances in the same category. We then design a spatial context learning module for modeling the internal structures of the object, through predicting the relative positions within the extent. These two modules can be easily plugged into any backbone networks during training and detached at inference time. Extensive experiments show that our look-into-object approach (LIO) achieves large performance gain on a number of benchmarks, including generic object recognition (ImageNet) and fine-grained object recognition tasks (CUB, Cars, Aircraft). We also show that this learning paradigm is highly generalizable to other tasks such as object detection and segmentation (MS COCO). Project page: //github.com/JDAI-CV/LIO.
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191