


Current math word problem (MWP) solvers are usually Seq2Seq models trained by the (one-problem; one-solution) pairs, each of which is made of a problem description and a solution showing reasoning flow to get the correct answer. However, one MWP problem naturally has multiple solution equations. The training of an MWP solver with (one-problem; one-solution) pairs excludes other correct solutions, and thus limits the generalizability of the MWP solver. One feasible solution to this limitation is to augment multiple solutions to a given problem. However, it is difficult to collect diverse and accurate augment solutions through human efforts. In this paper, we design a new training framework for an MWP solver by introducing a solution buffer and a solution discriminator. The buffer includes solutions generated by an MWP solver to encourage the training data diversity. The discriminator controls the quality of buffered solutions to participate in training. Our framework is flexibly applicable to a wide setting of fully, semi-weakly and weakly supervised training for all Seq2Seq MWP solvers. We conduct extensive experiments on a benchmark dataset Math23k and a new dataset named Weak12k, and show that our framework improves the performance of various MWP solvers under different settings by generating correct and diverse solutions.
相關內容
There is a recent trend of applying multi-agent reinforcement learning (MARL) to train an agent that can cooperate with humans in a zero-shot fashion without using any human data. The typical workflow is to first repeatedly run self-play (SP) to build a policy pool and then train the final adaptive policy against this pool. A crucial limitation of this framework is that every policy in the pool is optimized w.r.t. the environment reward function, which implicitly assumes that the testing partners of the adaptive policy will be precisely optimizing the same reward function as well. However, human objectives are often substantially biased according to their own preferences, which can differ greatly from the environment reward. We propose a more general framework, Hidden-Utility Self-Play (HSP), which explicitly models human biases as hidden reward functions in the self-play objective. By approximating the reward space as linear functions, HSP adopts an effective technique to generate an augmented policy pool with biased policies. We evaluate HSP on the Overcooked benchmark. Empirical results show that our HSP method produces higher rewards than baselines when cooperating with learned human models, manually scripted policies, and real humans. The HSP policy is also rated as the most assistive policy based on human feedback.
In machine learning, the selection of a promising model from a potentially large number of competing models and the assessment of its generalization performance are critical tasks that need careful consideration. Typically, model selection and evaluation are strictly separated endeavors, splitting the sample at hand into a training, validation, and evaluation set, and only compute a single confidence interval for the prediction performance of the final selected model. We however propose an algorithm how to compute valid lower confidence bounds for multiple models that have been selected based on their prediction performances in the evaluation set by interpreting the selection problem as a simultaneous inference problem. We use bootstrap tilting and a maxT-type multiplicity correction. The approach is universally applicable for any combination of prediction models, any model selection strategy, and any prediction performance measure that accepts weights. We conducted various simulation experiments which show that our proposed approach yields lower confidence bounds that are at least comparably good as bounds from standard approaches, and that reliably reach the nominal coverage probability. In addition, especially when sample size is small, our proposed approach yields better performing prediction models than the default selection of only one model for evaluation does.
Partition of unity methods (PUM) are of domain decomposition type and provide the opportunity for multiscale and multiphysics numerical modeling. Different physical models can exist within a PUM scheme for handling problems with zones of linear elasticity and zones where fractures occur. Here, the peridynamic (PD) model is used in regions of fracture and smooth PUM is used in the surrounding linear elastic media. The method is a so-called global-local enrichment strategy. The elastic fields of the undamaged media provide appropriate boundary data for the localized PD simulations. The first steps for a combined PD/PUM simulator are presented. In part I of this series, we show that the local PD approximation can be utilized to enrich the global PUM approximation to capture the true material response with high accuracy efficiently. Test problems are provided demonstrating the validity and potential of this numerical approach.
The top-k operator returns a k-sparse vector, where the non-zero values correspond to the k largest values of the input. Unfortunately, because it is a discontinuous function, it is difficult to incorporate in neural networks trained end-to-end with backpropagation. Recent works have considered differentiable relaxations, based either on regularization or perturbation techniques. However, to date, no approach is fully differentiable and sparse. In this paper, we propose new differentiable and sparse top-k operators. We view the top-k operator as a linear program over the permutahedron, the convex hull of permutations. We then introduce a p-norm regularization term to smooth out the operator, and show that its computation can be reduced to isotonic optimization. Our framework is significantly more general than the existing one and allows for example to express top-k operators that select values in magnitude. On the algorithmic side, in addition to pool adjacent violator (PAV) algorithms, we propose a new GPU/TPU-friendly Dykstra algorithm to solve isotonic optimization problems. We successfully use our operators to prune weights in neural networks, to fine-tune vision transformers, and as a router in sparse mixture of experts.
Motivated by the fact that forward and backward passes of a deep network naturally form symmetric mappings between input and output representations, we introduce a simple yet effective self-supervised vision model pretraining framework inspired by energy-based models (EBMs). In the proposed framework, we model energy estimation and data restoration as the forward and backward passes of a single network without any auxiliary components, e.g., an extra decoder. For the forward pass, we fit a network to an energy function that assigns low energy scores to samples that belong to an unlabeled dataset, and high energy otherwise. For the backward pass, we restore data from corrupted versions iteratively using gradient-based optimization along the direction of energy minimization. In this way, we naturally fold the encoder-decoder architecture widely used in masked image modeling into the forward and backward passes of a single vision model. Thus, our framework now accepts a wide range of pretext tasks with different data corruption methods, and permits models to be pretrained from masked image modeling, patch sorting, and image restoration, including super-resolution, denoising, and colorization. We support our findings with extensive experiments, and show the proposed method delivers comparable and even better performance with remarkably fewer epochs of training compared to the state-of-the-art self-supervised vision model pretraining methods. Our findings shed light on further exploring self-supervised vision model pretraining and pretext tasks beyond masked image modeling.
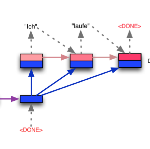
Large language models can perform various reasoning tasks by using chain-of-thought prompting, which guides them to find answers through step-by-step demonstrations. However, the quality of the prompts depends on the demonstrations given to the models, and creating many of them by hand is costly. We introduce Synthetic prompting, a method that leverages a few handcrafted examples to prompt the model to generate more examples by itself, and selects effective demonstrations to elicit better reasoning. Our method alternates between a backward and forward process to generate new examples. The backward process generates a question that match a sampled reasoning chain, so that the question is solvable and clear. The forward process produces a more detailed reasoning chain for the question, improving the quality of the example. We evaluate our method on numerical, symbolic, and algorithmic reasoning tasks, and show that it outperforms existing prompting techniques.
Large-scale models trained on broad data have recently become the mainstream architecture in computer vision due to their strong generalization performance. In this paper, the main focus is on an emergent ability in large vision models, known as in-context learning, which allows inference on unseen tasks by conditioning on in-context examples (a.k.a.~prompt) without updating the model parameters. This concept has been well-known in natural language processing but has only been studied very recently for large vision models. We for the first time provide a comprehensive investigation on the impact of in-context examples in computer vision, and find that the performance is highly sensitive to the choice of in-context examples. To overcome the problem, we propose a prompt retrieval framework to automate the selection of in-context examples. Specifically, we present (1) an unsupervised prompt retrieval method based on nearest example search using an off-the-shelf model, and (2) a supervised prompt retrieval method, which trains a neural network to choose examples that directly maximize in-context learning performance. The results demonstrate that our methods can bring non-trivial improvements to visual in-context learning in comparison to the commonly-used random selection.
We present a novel neural surface reconstruction method, called NeuS, for reconstructing objects and scenes with high fidelity from 2D image inputs. Existing neural surface reconstruction approaches, such as DVR and IDR, require foreground mask as supervision, easily get trapped in local minima, and therefore struggle with the reconstruction of objects with severe self-occlusion or thin structures. Meanwhile, recent neural methods for novel view synthesis, such as NeRF and its variants, use volume rendering to produce a neural scene representation with robustness of optimization, even for highly complex objects. However, extracting high-quality surfaces from this learned implicit representation is difficult because there are not sufficient surface constraints in the representation. In NeuS, we propose to represent a surface as the zero-level set of a signed distance function (SDF) and develop a new volume rendering method to train a neural SDF representation. We observe that the conventional volume rendering method causes inherent geometric errors (i.e. bias) for surface reconstruction, and therefore propose a new formulation that is free of bias in the first order of approximation, thus leading to more accurate surface reconstruction even without the mask supervision. Experiments on the DTU dataset and the BlendedMVS dataset show that NeuS outperforms the state-of-the-arts in high-quality surface reconstruction, especially for objects and scenes with complex structures and self-occlusion.
The ability to use inductive reasoning to extract general rules from multiple observations is a vital indicator of intelligence. As humans, we use this ability to not only interpret the world around us, but also to predict the outcomes of the various interactions we experience. Generalising over multiple observations is a task that has historically presented difficulties for machines to grasp, especially when requiring computer vision. In this paper, we propose a model that can extract general rules from video demonstrations by simultaneously performing summarisation and translation. Our approach differs from prior works by framing the problem as a multi-sequence-to-sequence task, wherein summarisation is learnt by the model. This allows our model to utilise edge cases that would otherwise be suppressed or discarded by traditional summarisation techniques. Additionally, we show that our approach can handle noisy specifications without the need for additional filtering methods. We evaluate our model by synthesising programs from video demonstrations in the Vizdoom environment achieving state-of-the-art results with a relative increase of 11.75% program accuracy on prior works
Most state-of-the-art machine learning techniques revolve around the optimisation of loss functions. Defining appropriate loss functions is therefore critical to successfully solving problems in this field. We present a survey of the most commonly used loss functions for a wide range of different applications, divided into classification, regression, ranking, sample generation and energy based modelling. Overall, we introduce 33 different loss functions and we organise them into an intuitive taxonomy. Each loss function is given a theoretical backing and we describe where it is best used. This survey aims to provide a reference of the most essential loss functions for both beginner and advanced machine learning practitioners.
小貼士
登錄享
相關主題


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191