
We consider Model-Agnostic Meta-Learning (MAML) methods for Reinforcement Learning (RL) problems, where the goal is to find a policy using data from several tasks represented by Markov Decision Processes (MDPs) that can be updated by one step of stochastic policy gradient for the realized MDP. In particular, using stochastic gradients in MAML update steps is crucial for RL problems since computation of exact gradients requires access to a large number of possible trajectories. For this formulation, we propose a variant of the MAML method, named Stochastic Gradient Meta-Reinforcement Learning (SG-MRL), and study its convergence properties. We derive the iteration and sample complexity of SG-MRL to find an $\epsilon$-first-order stationary point, which, to the best of our knowledge, provides the first convergence guarantee for model-agnostic meta-reinforcement learning algorithms. We further show how our results extend to the case where more than one step of stochastic policy gradient method is used at test time. Finally, we empirically compare SG-MRL and MAML in several deep RL environments.
相關內容
Safety is a critical component of autonomous systems and remains a challenge for learning-based policies to be utilized in the real world. In particular, policies learned using reinforcement learning often fail to generalize to novel environments due to unsafe behavior. In this paper, we propose Sim-to-Lab-to-Real to safely close the reality gap. To improve safety, we apply a dual policy setup where a performance policy is trained using the cumulative task reward and a backup (safety) policy is trained by solving the reach-avoid Bellman Equation based on Hamilton-Jacobi reachability analysis. In Sim-to-Lab transfer, we apply a supervisory control scheme to shield unsafe actions during exploration; in Lab-to-Real transfer, we leverage the Probably Approximately Correct (PAC)-Bayes framework to provide lower bounds on the expected performance and safety of policies in unseen environments. We empirically study the proposed framework for ego-vision navigation in two types of indoor environments including a photo-realistic one. We also demonstrate strong generalization performance through hardware experiments in real indoor spaces with a quadrupedal robot. See //sites.google.com/princeton.edu/sim-to-lab-to-real for supplementary material.

Multi-agent actor-critic algorithms are an important part of the Reinforcement Learning paradigm. We propose three fully decentralized multi-agent natural actor-critic (MAN) algorithms in this work. The objective is to collectively find a joint policy that maximizes the average long-term return of these agents. In the absence of a central controller and to preserve privacy, agents communicate some information to their neighbors via a time-varying communication network. We prove convergence of all the 3 MAN algorithms to a globally asymptotically stable set of the ODE corresponding to actor update; these use linear function approximations. We show that the Kullback-Leibler divergence between policies of successive iterates is proportional to the objective function's gradient. We observe that the minimum singular value of the Fisher information matrix is well within the reciprocal of the policy parameter dimension. Using this, we theoretically show that the optimal value of the deterministic variant of the MAN algorithm at each iterate dominates that of the standard gradient-based multi-agent actor-critic (MAAC) algorithm. To our knowledge, it is a first such result in multi-agent reinforcement learning (MARL). To illustrate the usefulness of our proposed algorithms, we implement them on a bi-lane traffic network to reduce the average network congestion. We observe an almost 25\% reduction in the average congestion in 2 MAN algorithms; the average congestion in another MAN algorithm is on par with the MAAC algorithm. We also consider a generic $15$ agent MARL; the performance of the MAN algorithms is again as good as the MAAC algorithm.
We consider infinite-horizon discounted Markov decision problems with finite state and action spaces. We show that with direct parametrization in the policy space, the weighted value function, although non-convex in general, is both quasi-convex and quasi-concave. While quasi-convexity helps explain the convergence of policy gradient methods to global optima, quasi-concavity hints at their convergence guarantees using arbitrarily large step sizes that are not dictated by the Lipschitz constant charactering smoothness of the value function. In particular, we show that when using geometrically increasing step sizes, a general class of policy mirror descent methods, including the natural policy gradient method and a projected Q-descent method, all enjoy a linear rate of convergence without relying on entropy or other strongly convex regularization. In addition, we develop a theory of weak gradient-mapping dominance and use it to prove sharper sublinear convergence rate of the projected policy gradient method. Finally, we also analyze the convergence rate of an inexact policy mirror descent method and estimate its sample complexity under a simple generative model.
We study the offline meta-reinforcement learning (OMRL) problem, a paradigm which enables reinforcement learning (RL) algorithms to quickly adapt to unseen tasks without any interactions with the environments, making RL truly practical in many real-world applications. This problem is still not fully understood, for which two major challenges need to be addressed. First, offline RL usually suffers from bootstrapping errors of out-of-distribution state-actions which leads to divergence of value functions. Second, meta-RL requires efficient and robust task inference learned jointly with control policy. In this work, we enforce behavior regularization on learned policy as a general approach to offline RL, combined with a deterministic context encoder for efficient task inference. We propose a novel negative-power distance metric on bounded context embedding space, whose gradients propagation is detached from the Bellman backup. We provide analysis and insight showing that some simple design choices can yield substantial improvements over recent approaches involving meta-RL and distance metric learning. To the best of our knowledge, our method is the first model-free and end-to-end OMRL algorithm, which is computationally efficient and demonstrated to outperform prior algorithms on several meta-RL benchmarks.
Discovering causal structure among a set of variables is a fundamental problem in many empirical sciences. Traditional score-based casual discovery methods rely on various local heuristics to search for a Directed Acyclic Graph (DAG) according to a predefined score function. While these methods, e.g., greedy equivalence search, may have attractive results with infinite samples and certain model assumptions, they are usually less satisfactory in practice due to finite data and possible violation of assumptions. Motivated by recent advances in neural combinatorial optimization, we propose to use Reinforcement Learning (RL) to search for the DAG with the best scoring. Our encoder-decoder model takes observable data as input and generates graph adjacency matrices that are used to compute rewards. The reward incorporates both the predefined score function and two penalty terms for enforcing acyclicity. In contrast with typical RL applications where the goal is to learn a policy, we use RL as a search strategy and our final output would be the graph, among all graphs generated during training, that achieves the best reward. We conduct experiments on both synthetic and real datasets, and show that the proposed approach not only has an improved search ability but also allows a flexible score function under the acyclicity constraint.
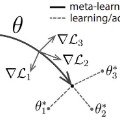
Convolutional neural networks (CNNs) have shown dramatic improvements in single image super-resolution (SISR) by using large-scale external samples. Despite their remarkable performance based on the external dataset, they cannot exploit internal information within a specific image. Another problem is that they are applicable only to the specific condition of data that they are supervised. For instance, the low-resolution (LR) image should be a "bicubic" downsampled noise-free image from a high-resolution (HR) one. To address both issues, zero-shot super-resolution (ZSSR) has been proposed for flexible internal learning. However, they require thousands of gradient updates, i.e., long inference time. In this paper, we present Meta-Transfer Learning for Zero-Shot Super-Resolution (MZSR), which leverages ZSSR. Precisely, it is based on finding a generic initial parameter that is suitable for internal learning. Thus, we can exploit both external and internal information, where one single gradient update can yield quite considerable results. (See Figure 1). With our method, the network can quickly adapt to a given image condition. In this respect, our method can be applied to a large spectrum of image conditions within a fast adaptation process.
Deep reinforcement learning suggests the promise of fully automated learning of robotic control policies that directly map sensory inputs to low-level actions. However, applying deep reinforcement learning methods on real-world robots is exceptionally difficult, due both to the sample complexity and, just as importantly, the sensitivity of such methods to hyperparameters. While hyperparameter tuning can be performed in parallel in simulated domains, it is usually impractical to tune hyperparameters directly on real-world robotic platforms, especially legged platforms like quadrupedal robots that can be damaged through extensive trial-and-error learning. In this paper, we develop a stable variant of the soft actor-critic deep reinforcement learning algorithm that requires minimal hyperparameter tuning, while also requiring only a modest number of trials to learn multilayer neural network policies. This algorithm is based on the framework of maximum entropy reinforcement learning, and automatically trades off exploration against exploitation by dynamically and automatically tuning a temperature parameter that determines the stochasticity of the policy. We show that this method achieves state-of-the-art performance on four standard benchmark environments. We then demonstrate that it can be used to learn quadrupedal locomotion gaits on a real-world Minitaur robot, learning to walk from scratch directly in the real world in two hours of training.
Meta-learning is a powerful tool that builds on multi-task learning to learn how to quickly adapt a model to new tasks. In the context of reinforcement learning, meta-learning algorithms can acquire reinforcement learning procedures to solve new problems more efficiently by meta-learning prior tasks. The performance of meta-learning algorithms critically depends on the tasks available for meta-training: in the same way that supervised learning algorithms generalize best to test points drawn from the same distribution as the training points, meta-learning methods generalize best to tasks from the same distribution as the meta-training tasks. In effect, meta-reinforcement learning offloads the design burden from algorithm design to task design. If we can automate the process of task design as well, we can devise a meta-learning algorithm that is truly automated. In this work, we take a step in this direction, proposing a family of unsupervised meta-learning algorithms for reinforcement learning. We describe a general recipe for unsupervised meta-reinforcement learning, and describe an effective instantiation of this approach based on a recently proposed unsupervised exploration technique and model-agnostic meta-learning. We also discuss practical and conceptual considerations for developing unsupervised meta-learning methods. Our experimental results demonstrate that unsupervised meta-reinforcement learning effectively acquires accelerated reinforcement learning procedures without the need for manual task design, significantly exceeds the performance of learning from scratch, and even matches performance of meta-learning methods that use hand-specified task distributions.
Existing multi-agent reinforcement learning methods are limited typically to a small number of agents. When the agent number increases largely, the learning becomes intractable due to the curse of the dimensionality and the exponential growth of agent interactions. In this paper, we present Mean Field Reinforcement Learning where the interactions within the population of agents are approximated by those between a single agent and the average effect from the overall population or neighboring agents; the interplay between the two entities is mutually reinforced: the learning of the individual agent's optimal policy depends on the dynamics of the population, while the dynamics of the population change according to the collective patterns of the individual policies. We develop practical mean field Q-learning and mean field Actor-Critic algorithms and analyze the convergence of the solution to Nash equilibrium. Experiments on Gaussian squeeze, Ising model, and battle games justify the learning effectiveness of our mean field approaches. In addition, we report the first result to solve the Ising model via model-free reinforcement learning methods.
Policy gradient methods are often applied to reinforcement learning in continuous multiagent games. These methods perform local search in the joint-action space, and as we show, they are susceptable to a game-theoretic pathology known as relative overgeneralization. To resolve this issue, we propose Multiagent Soft Q-learning, which can be seen as the analogue of applying Q-learning to continuous controls. We compare our method to MADDPG, a state-of-the-art approach, and show that our method achieves better coordination in multiagent cooperative tasks, converging to better local optima in the joint action space.


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191