

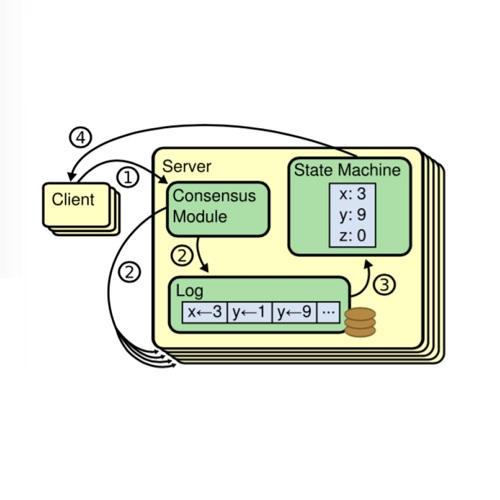
Crash fault tolerant (CFT) consensus algorithms are commonly used in scenarios where system components are trusted, such as enterprise settings. CFT algorithms offer high throughput and low latency, making them an attractive option for centralized operations that require fault tolerance. However, CFT consensus is vulnerable to Byzantine faults, which can be introduced by a single corrupt component. Such faults can break consensus in the system. Byzantine fault tolerant (BFT) consensus algorithms withstand Byzantine faults, but they are not as competitive with CFT algorithms in terms of performance. In this work, we explore a middle ground between BFT and CFT consensus by exploring the role of accountability in CFT protocols. That is, if a CFT protocol node breaks protocol and affects consensus safety, we aim to identify which node was the culprit. Based on Raft, one of the most popular CFT algorithms, we present Raft-Forensics, which provides accountability over Byzantine faults. We theoretically prove that if two honest components fail to reach consensus, the Raft-Forensics auditing algorithm finds the adversarial component that caused the inconsistency. In an empirical evaluation, we demonstrate that Raft-Forensics performs similarly to Raft and significantly better than state-of-the-art BFT algorithms. With 256 byte messages, Raft-Forensics achieves peak throughput 87.8% of vanilla Raft at 46% higher latency, while state-of-the-art BFT protocol Dumbo-NG only achieves 18.9% peak throughput at nearly $6\times$ higher latency.
相關內容
Community detection is the problem of identifying natural divisions in networks. Efficient parallel algorithms for identifying such divisions is critical in a number of applications, where the size of datasets have reached significant scales. This technical report presents an optimized parallel implementation of Leiden, a high quality community detection method, for shared memory multicore systems. On a server equipped with dual 16-core Intel Xeon Gold 6226R processors, our Leiden implementation, which we term as GVE-Leiden, outperforms the original Leiden, igraph Leiden, and NetworKit Leiden by 373x, 86x, and 7.2x respectively - achieving a processing rate of 352M edges/s on a 3.8B edge graph. Compared to GVE-Louvain, our parallel Louvain implementation, GVE-Leiden achieves an 11x reduction in disconnected communities, with only a 36% increase in runtime. In addition, GVE-Leiden improves performance at an average rate of 1.6x for every doubling of threads.
Despite significant recent progress in the field of autonomous driving, modern methods still struggle and can incur serious accidents when encountering long-tail unforeseen events and challenging urban scenarios. On the one hand, large language models (LLM) have shown impressive reasoning capabilities that approach "Artificial General Intelligence". On the other hand, previous autonomous driving methods tend to rely on limited-format inputs (e.g. sensor data and navigation waypoints), restricting the vehicle's ability to understand language information and interact with humans. To this end, this paper introduces LMDrive, a novel language-guided, end-to-end, closed-loop autonomous driving framework. LMDrive uniquely processes and integrates multi-modal sensor data with natural language instructions, enabling interaction with humans and navigation software in realistic instructional settings. To facilitate further research in language-based closed-loop autonomous driving, we also publicly release the corresponding dataset which includes approximately 64K instruction-following data clips, and the LangAuto benchmark that tests the system's ability to handle complex instructions and challenging driving scenarios. Extensive closed-loop experiments are conducted to demonstrate LMDrive's effectiveness. To the best of our knowledge, we're the very first work to leverage LLMs for closed-loop end-to-end autonomous driving. Codes, models, and datasets can be found at //github.com/opendilab/LMDrive
Super-resolution (SR) techniques have recently been proposed to upscale the outputs of neural radiance fields (NeRF) and generate high-quality images with enhanced inference speeds. However, existing NeRF+SR methods increase training overhead by using extra input features, loss functions, and/or expensive training procedures such as knowledge distillation. In this paper, we aim to leverage SR for efficiency gains without costly training or architectural changes. Specifically, we build a simple NeRF+SR pipeline that directly combines existing modules, and we propose a lightweight augmentation technique, random patch sampling, for training. Compared to existing NeRF+SR methods, our pipeline mitigates the SR computing overhead and can be trained up to 23x faster, making it feasible to run on consumer devices such as the Apple MacBook. Experiments show our pipeline can upscale NeRF outputs by 2-4x while maintaining high quality, increasing inference speeds by up to 18x on an NVIDIA V100 GPU and 12.8x on an M1 Pro chip. We conclude that SR can be a simple but effective technique for improving the efficiency of NeRF models for consumer devices.
Error correction in automatic speech recognition (ASR) aims to correct those incorrect words in sentences generated by ASR models. Since recent ASR models usually have low word error rate (WER), to avoid affecting originally correct tokens, error correction models should only modify incorrect words, and therefore detecting incorrect words is important for error correction. Previous works on error correction either implicitly detect error words through target-source attention or CTC (connectionist temporal classification) loss, or explicitly locate specific deletion/substitution/insertion errors. However, implicit error detection does not provide clear signal about which tokens are incorrect and explicit error detection suffers from low detection accuracy. In this paper, we propose SoftCorrect with a soft error detection mechanism to avoid the limitations of both explicit and implicit error detection. Specifically, we first detect whether a token is correct or not through a probability produced by a dedicatedly designed language model, and then design a constrained CTC loss that only duplicates the detected incorrect tokens to let the decoder focus on the correction of error tokens. Compared with implicit error detection with CTC loss, SoftCorrect provides explicit signal about which words are incorrect and thus does not need to duplicate every token but only incorrect tokens; compared with explicit error detection, SoftCorrect does not detect specific deletion/substitution/insertion errors but just leaves it to CTC loss. Experiments on AISHELL-1 and Aidatatang datasets show that SoftCorrect achieves 26.1% and 9.4% CER reduction respectively, outperforming previous works by a large margin, while still enjoying fast speed of parallel generation.
In rapidly-evolving domains such as autonomous driving, the use of multiple sensors with different modalities is crucial to ensure high operational precision and stability. To correctly exploit the provided information by each sensor in a single common frame, it is essential for these sensors to be accurately calibrated. In this paper, we leverage the ability of Neural Radiance Fields (NeRF) to represent different sensors modalities in a common volumetric representation to achieve robust and accurate spatio-temporal sensor calibration. By designing a partitioning approach based on the visible part of the scene for each sensor, we formulate the calibration problem using only the overlapping areas. This strategy results in a more robust and accurate calibration that is less prone to failure. We demonstrate that our approach works on outdoor urban scenes by validating it on multiple established driving datasets. Results show that our method is able to get better accuracy and robustness compared to existing methods.
The emergence of large language models (LLMs) has substantially influenced natural language processing, demonstrating exceptional results across various tasks. In this study, we employ ``Introspective Tips" to facilitate LLMs in self-optimizing their decision-making. By introspectively examining trajectories, LLM refines its policy by generating succinct and valuable tips. Our method enhances the agent's performance in both few-shot and zero-shot learning situations by considering three essential scenarios: learning from the agent's past experiences, integrating expert demonstrations, and generalizing across diverse games. Importantly, we accomplish these improvements without fine-tuning the LLM parameters; rather, we adjust the prompt to generalize insights from the three aforementioned situations. Our framework not only supports but also emphasizes the advantage of employing LLM in in-contxt decision-making. Experiments involving over 100 games in TextWorld illustrate the superior performance of our approach.

The existence of representative datasets is a prerequisite of many successful artificial intelligence and machine learning models. However, the subsequent application of these models often involves scenarios that are inadequately represented in the data used for training. The reasons for this are manifold and range from time and cost constraints to ethical considerations. As a consequence, the reliable use of these models, especially in safety-critical applications, is a huge challenge. Leveraging additional, already existing sources of knowledge is key to overcome the limitations of purely data-driven approaches, and eventually to increase the generalization capability of these models. Furthermore, predictions that conform with knowledge are crucial for making trustworthy and safe decisions even in underrepresented scenarios. This work provides an overview of existing techniques and methods in the literature that combine data-based models with existing knowledge. The identified approaches are structured according to the categories integration, extraction and conformity. Special attention is given to applications in the field of autonomous driving.
Generative commonsense reasoning which aims to empower machines to generate sentences with the capacity of reasoning over a set of concepts is a critical bottleneck for text generation. Even the state-of-the-art pre-trained language generation models struggle at this task and often produce implausible and anomalous sentences. One reason is that they rarely consider incorporating the knowledge graph which can provide rich relational information among the commonsense concepts. To promote the ability of commonsense reasoning for text generation, we propose a novel knowledge graph augmented pre-trained language generation model KG-BART, which encompasses the complex relations of concepts through the knowledge graph and produces more logical and natural sentences as output. Moreover, KG-BART can leverage the graph attention to aggregate the rich concept semantics that enhances the model generalization on unseen concept sets. Experiments on benchmark CommonGen dataset verify the effectiveness of our proposed approach by comparing with several strong pre-trained language generation models, particularly KG-BART outperforms BART by 5.80, 4.60, in terms of BLEU-3, 4. Moreover, we also show that the generated context by our model can work as background scenarios to benefit downstream commonsense QA tasks.
Pre-trained language representation models, such as BERT, capture a general language representation from large-scale corpora, but lack domain-specific knowledge. When reading a domain text, experts make inferences with relevant knowledge. For machines to achieve this capability, we propose a knowledge-enabled language representation model (K-BERT) with knowledge graphs (KGs), in which triples are injected into the sentences as domain knowledge. However, too much knowledge incorporation may divert the sentence from its correct meaning, which is called knowledge noise (KN) issue. To overcome KN, K-BERT introduces soft-position and visible matrix to limit the impact of knowledge. K-BERT can easily inject domain knowledge into the models by equipped with a KG without pre-training by-self because it is capable of loading model parameters from the pre-trained BERT. Our investigation reveals promising results in twelve NLP tasks. Especially in domain-specific tasks (including finance, law, and medicine), K-BERT significantly outperforms BERT, which demonstrates that K-BERT is an excellent choice for solving the knowledge-driven problems that require experts.
Most existing works in visual question answering (VQA) are dedicated to improving the accuracy of predicted answers, while disregarding the explanations. We argue that the explanation for an answer is of the same or even more importance compared with the answer itself, since it makes the question and answering process more understandable and traceable. To this end, we propose a new task of VQA-E (VQA with Explanation), where the computational models are required to generate an explanation with the predicted answer. We first construct a new dataset, and then frame the VQA-E problem in a multi-task learning architecture. Our VQA-E dataset is automatically derived from the VQA v2 dataset by intelligently exploiting the available captions. We have conducted a user study to validate the quality of explanations synthesized by our method. We quantitatively show that the additional supervision from explanations can not only produce insightful textual sentences to justify the answers, but also improve the performance of answer prediction. Our model outperforms the state-of-the-art methods by a clear margin on the VQA v2 dataset.
小貼士
登錄享
相關主題
注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191