

Annotation of multimedia data by humans is time-consuming and costly, while reliable automatic generation of semantic metadata is a major challenge. We propose a framework to extract semantic metadata from automatically generated video captions. As metadata, we consider entities, the entities' properties, relations between entities, and the video category. We employ two state-of-the-art dense video captioning models with masked transformer (MT) and parallel decoding (PVDC) to generate captions for videos of the ActivityNet Captions dataset. Our experiments show that it is possible to extract entities, their properties, relations between entities, and the video category from the generated captions. We observe that the quality of the extracted information is mainly influenced by the quality of the event localization in the video as well as the performance of the event caption generation.
相關內容
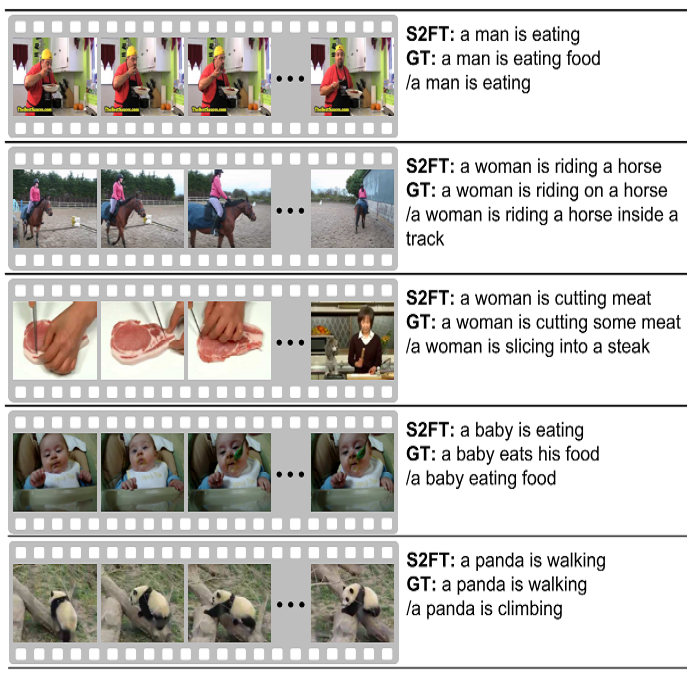
視頻描述生成(Video Caption),就是從視頻中自動生成一段描述性文字
The three-dimensional reconstruction of vocal folds in medicine usually involves endoscopy and an approach to extract depth information like structured light or stereo matching of images. The resulting mesh can accurately represent the superior area of the vocal folds, while new approaches also try to reconstruct the inferior area. We propose a novel approach to extract the time-dependent 3D geometry of the vocal fold from optical measurements on both the superior and inferior side, requiring optical measurements only from the superior side. First, a time-dependent, tri-variate surface velocity vector field is reconstructed using a high-speed camera and a laser Doppler vibrometer in an experimental environment. This vector field serves as target in an inverse finite-element simulation that optimizes the forces applied to a deformable vocal fold model such that the resulting movement after FEM simulation matches the velocity observations on the superior side. The required forces for the finite element method simulation are treated as unknowns and are assembled using multiple scalar fields. We use tensor products in B\'ezier Bernstein basis for our scalar fields to reduce the degrees of freedom for our optimization. We use gradient descent to optimize the control points of the force field polynomials. Our utilized error metric for gradient descent consists of two terms. The first term is used to match the simulated velocities to the observed measurements, while the second term measures the silhouette difference between observation and simulation.
Privacy and Byzantine resilience (BR) are two crucial requirements of modern-day distributed machine learning. The two concepts have been extensively studied individually but the question of how to combine them effectively remains unanswered. This paper contributes to addressing this question by studying the extent to which the distributed SGD algorithm, in the standard parameter-server architecture, can learn an accurate model despite (a) a fraction of the workers being malicious (Byzantine), and (b) the other fraction, whilst being honest, providing noisy information to the server to ensure differential privacy (DP). We first observe that the integration of standard practices in DP and BR is not straightforward. In fact, we show that many existing results on the convergence of distributed SGD under Byzantine faults, especially those relying on $(\alpha,f)$-Byzantine resilience, are rendered invalid when honest workers enforce DP. To circumvent this shortcoming, we revisit the theory of $(\alpha,f)$-BR to obtain an approximate convergence guarantee. Our analysis provides key insights on how to improve this guarantee through hyperparameter optimization. Essentially, our theoretical and empirical results show that (1) an imprudent combination of standard approaches to DP and BR might be fruitless, but (2) by carefully re-tuning the learning algorithm, we can obtain reasonable learning accuracy while simultaneously guaranteeing DP and BR.
Visual planning simulates how humans make decisions to achieve desired goals in the form of searching for visual causal transitions between an initial visual state and a final visual goal state. It has become increasingly important in egocentric vision with its advantages in guiding agents to perform daily tasks in complex environments. In this paper, we propose an interpretable and generalizable visual planning framework consisting of i) a novel Substitution-based Concept Learner (SCL) that abstracts visual inputs into disentangled concept representations, ii) symbol abstraction and reasoning that performs task planning via the self-learned symbols, and iii) a Visual Causal Transition model (ViCT) that grounds visual causal transitions to semantically similar real-world actions. Given an initial state, we perform goal-conditioned visual planning with a symbolic reasoning method fueled by the learned representations and causal transitions to reach the goal state. To verify the effectiveness of the proposed model, we collect a large-scale visual planning dataset based on AI2-THOR, dubbed as CCTP. Extensive experiments on this challenging dataset demonstrate the superior performance of our method in visual task planning. Empirically, we show that our framework can generalize to unseen task trajectories and unseen object categories.
Multiway data analysis aims to uncover patterns in data structured as multi-indexed arrays, and the covariance of such data plays a crucial role in various machine learning applications. However, the intrinsically high dimension of multiway covariance presents significant challenges. To address these challenges, factorized covariance models have been proposed that rely on a separability assumption: the multiway covariance can be accurately expressed as a sum of Kronecker products of mode-wise covariances. This paper is concerned with the accuracy of such separable models for representing multiway covariances. We reduce the question of whether a given covariance can be represented as a separable multiway covariance to an equivalent question about separability of quantum states. Based on this equivalence, we establish that generic multiway covariances tend to be not separable. Moreover, we show that determining the best separable approximation of a generic covariance is NP-hard. Our results suggest that factorized covariance models might not accurately approximate covariance, without additional assumptions ensuring separability. To balance these negative results, we propose an iterative Frank-Wolfe algorithm for computing Kronecker-separable covariance approximations with some additional side information. We establish an oracle complexity bound and empirically observe its consistent convergence to a separable limit point, often close to the ``best'' separable approximation. These results suggest that practical methods may be able to find a Kronecker-separable approximation of covariances, despite the worst-case NP hardness results.
We introduce a novel modeling approach for time series imputation and forecasting, tailored to address the challenges often encountered in real-world data, such as irregular samples, missing data, or unaligned measurements from multiple sensors. Our method relies on a continuous-time-dependent model of the series' evolution dynamics. It leverages adaptations of conditional, implicit neural representations for sequential data. A modulation mechanism, driven by a meta-learning algorithm, allows adaptation to unseen samples and extrapolation beyond observed time-windows for long-term predictions. The model provides a highly flexible and unified framework for imputation and forecasting tasks across a wide range of challenging scenarios. It achieves state-of-the-art performance on classical benchmarks and outperforms alternative time-continuous models.
With their unique combination of characteristics - an energy density almost 100 times that of human muscle, and a power density of 5.3 kW/kg, similar to a jet engine's output - Nylon artificial muscles stand out as particularly apt for robotics applications. However, the necessity of integrating sensors and controllers poses a limitation to their practical usage. Here we report a constant power open-loop controller based on machine learning. We show that we can control the position of a nylon artificial muscle without external sensors. To this end, we construct a mapping from a desired displacement trajectory to a required power using an ensemble encoder-style feed-forward neural network. The neural controller is carefully trained on a physics-based denoised dataset and can be fine-tuned to accommodate various types of thermal artificial muscles, irrespective of the presence or absence of hysteresis.
Recent contrastive representation learning methods rely on estimating mutual information (MI) between multiple views of an underlying context. E.g., we can derive multiple views of a given image by applying data augmentation, or we can split a sequence into views comprising the past and future of some step in the sequence. Contrastive lower bounds on MI are easy to optimize, but have a strong underestimation bias when estimating large amounts of MI. We propose decomposing the full MI estimation problem into a sum of smaller estimation problems by splitting one of the views into progressively more informed subviews and by applying the chain rule on MI between the decomposed views. This expression contains a sum of unconditional and conditional MI terms, each measuring modest chunks of the total MI, which facilitates approximation via contrastive bounds. To maximize the sum, we formulate a contrastive lower bound on the conditional MI which can be approximated efficiently. We refer to our general approach as Decomposed Estimation of Mutual Information (DEMI). We show that DEMI can capture a larger amount of MI than standard non-decomposed contrastive bounds in a synthetic setting, and learns better representations in a vision domain and for dialogue generation.
Graph Neural Networks (GNNs) have received considerable attention on graph-structured data learning for a wide variety of tasks. The well-designed propagation mechanism which has been demonstrated effective is the most fundamental part of GNNs. Although most of GNNs basically follow a message passing manner, litter effort has been made to discover and analyze their essential relations. In this paper, we establish a surprising connection between different propagation mechanisms with a unified optimization problem, showing that despite the proliferation of various GNNs, in fact, their proposed propagation mechanisms are the optimal solution optimizing a feature fitting function over a wide class of graph kernels with a graph regularization term. Our proposed unified optimization framework, summarizing the commonalities between several of the most representative GNNs, not only provides a macroscopic view on surveying the relations between different GNNs, but also further opens up new opportunities for flexibly designing new GNNs. With the proposed framework, we discover that existing works usually utilize naive graph convolutional kernels for feature fitting function, and we further develop two novel objective functions considering adjustable graph kernels showing low-pass or high-pass filtering capabilities respectively. Moreover, we provide the convergence proofs and expressive power comparisons for the proposed models. Extensive experiments on benchmark datasets clearly show that the proposed GNNs not only outperform the state-of-the-art methods but also have good ability to alleviate over-smoothing, and further verify the feasibility for designing GNNs with our unified optimization framework.
Graph neural networks (GNNs) are a popular class of machine learning models whose major advantage is their ability to incorporate a sparse and discrete dependency structure between data points. Unfortunately, GNNs can only be used when such a graph-structure is available. In practice, however, real-world graphs are often noisy and incomplete or might not be available at all. With this work, we propose to jointly learn the graph structure and the parameters of graph convolutional networks (GCNs) by approximately solving a bilevel program that learns a discrete probability distribution on the edges of the graph. This allows one to apply GCNs not only in scenarios where the given graph is incomplete or corrupted but also in those where a graph is not available. We conduct a series of experiments that analyze the behavior of the proposed method and demonstrate that it outperforms related methods by a significant margin.
We introduce a multi-task setup of identifying and classifying entities, relations, and coreference clusters in scientific articles. We create SciERC, a dataset that includes annotations for all three tasks and develop a unified framework called Scientific Information Extractor (SciIE) for with shared span representations. The multi-task setup reduces cascading errors between tasks and leverages cross-sentence relations through coreference links. Experiments show that our multi-task model outperforms previous models in scientific information extraction without using any domain-specific features. We further show that the framework supports construction of a scientific knowledge graph, which we use to analyze information in scientific literature.
小貼士
登錄享

注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191