


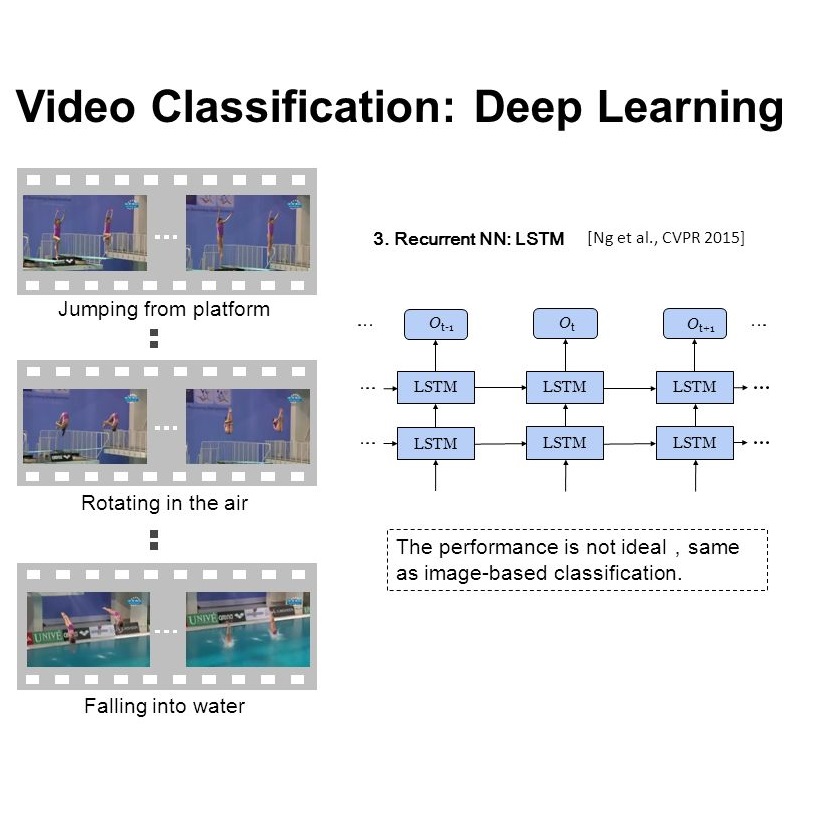
Localization of the narrowest position of the vessel and corresponding vessel and remnant vessel delineation in carotid ultrasound (US) are essential for carotid stenosis grading (CSG) in clinical practice. However, the pipeline is time-consuming and tough due to the ambiguous boundaries of plaque and temporal variation. To automatize this procedure, a large number of manual delineations are usually required, which is not only laborious but also not reliable given the annotation difficulty. In this study, we present the first video classification framework for automatic CSG. Our contribution is three-fold. First, to avoid the requirement of laborious and unreliable annotation, we propose a novel and effective video classification network for weakly-supervised CSG. Second, to ease the model training, we adopt an inflation strategy for the network, where pre-trained 2D convolution weights can be adapted into the 3D counterpart in our network. In this way, the existing pre-trained large model can be used as an effective warm start for our network. Third, to enhance the feature discrimination of the video, we propose a novel attention-guided multi-dimension fusion (AMDF) transformer encoder to model and integrate global dependencies within and across spatial and temporal dimensions, where two lightweight cross-dimensional attention mechanisms are designed. Our approach is extensively validated on a large clinically collected carotid US video dataset, demonstrating state-of-the-art performance compared with strong competitors.
相關內容
Networking:IFIP International Conferences on Networking。
Explanation:國際網絡會議。
Publisher:IFIP。
SIT:
We consider the problem of blob detection for uncertain images, such as images that have to be inferred from noisy measurements. Extending recent work motivated by astronomical applications, we propose an approach that represents the uncertainty in the position and size of a blob by a region in a three-dimensional scale space. Motivated by classic tube methods such as the taut-string algorithm, these regions are obtained from level sets of the minimizer of a total variation functional within a high-dimensional tube. The resulting non-smooth optimization problem is challenging to solve, and we compare various numerical approaches for its solution and relate them to the literature on constrained total variation denoising. Finally, the proposed methodology is illustrated on numerical experiments for deconvolution and models related to astrophysics, where it is demonstrated that it allows to represent the uncertainty in the detected blobs in a precise and physically interpretable way.
Few-shot classification aims to adapt to new tasks with limited labeled examples. To fully use the accessible data, recent methods explore suitable measures for the similarity between the query and support images and better high-dimensional features with meta-training and pre-training strategies. However, the potential of multi-modality information has barely been explored, which may bring promising improvement for few-shot classification. In this paper, we propose a Language-guided Prototypical Network (LPN) for few-shot classification, which leverages the complementarity of vision and language modalities via two parallel branches. Concretely, to introduce language modality with limited samples in the visual task, we leverage a pre-trained text encoder to extract class-level text features directly from class names while processing images with a conventional image encoder. Then, a language-guided decoder is introduced to obtain text features corresponding to each image by aligning class-level features with visual features. In addition, to take advantage of class-level features and prototypes, we build a refined prototypical head that generates robust prototypes in the text branch for follow-up measurement. Finally, we aggregate the visual and text logits to calibrate the deviation of a single modality. Extensive experiments demonstrate the competitiveness of LPN against state-of-the-art methods on benchmark datasets.
Recent works show that the data distribution in a network's latent space is useful for estimating classification uncertainty and detecting Out-of-distribution (OOD) samples. To obtain a well-regularized latent space that is conducive for uncertainty estimation, existing methods bring in significant changes to model architectures and training procedures. In this paper, we present a lightweight, fast, and high-performance regularization method for Mahalanobis distance-based uncertainty prediction, and that requires minimal changes to the network's architecture. To derive Gaussian latent representation favourable for Mahalanobis Distance calculation, we introduce a self-supervised representation learning method that separates in-class representations into multiple Gaussians. Classes with non-Gaussian representations are automatically identified and dynamically clustered into multiple new classes that are approximately Gaussian. Evaluation on standard OOD benchmarks shows that our method achieves state-of-the-art results on OOD detection with minimal inference time, and is very competitive on predictive probability calibration. Finally, we show the applicability of our method to a real-life computer vision use case on microorganism classification.
Human tissue and its constituent cells form a microenvironment that is fundamentally three-dimensional (3D). However, the standard-of-care in pathologic diagnosis involves selecting a few two-dimensional (2D) sections for microscopic evaluation, risking sampling bias and misdiagnosis. Diverse methods for capturing 3D tissue morphologies have been developed, but they have yet had little translation to clinical practice; manual and computational evaluations of such large 3D data have so far been impractical and/or unable to provide patient-level clinical insights. Here we present Modality-Agnostic Multiple instance learning for volumetric Block Analysis (MAMBA), a deep-learning-based platform for processing 3D tissue images from diverse imaging modalities and predicting patient outcomes. Archived prostate cancer specimens were imaged with open-top light-sheet microscopy or microcomputed tomography and the resulting 3D datasets were used to train risk-stratification networks based on 5-year biochemical recurrence outcomes via MAMBA. With the 3D block-based approach, MAMBA achieves an area under the receiver operating characteristic curve (AUC) of 0.86 and 0.74, superior to 2D traditional single-slice-based prognostication (AUC of 0.79 and 0.57), suggesting superior prognostication with 3D morphological features. Further analyses reveal that the incorporation of greater tissue volume improves prognostic performance and mitigates risk prediction variability from sampling bias, suggesting the value of capturing larger extents of heterogeneous 3D morphology. With the rapid growth and adoption of 3D spatial biology and pathology techniques by researchers and clinicians, MAMBA provides a general and efficient framework for 3D weakly supervised learning for clinical decision support and can help to reveal novel 3D morphological biomarkers for prognosis and therapeutic response.
Traditional AI-planning methods for task planning in robotics require a symbolically encoded domain description. While powerful in well-defined scenarios, as well as human-interpretable, setting this up requires substantial effort. Different from this, most everyday planning tasks are solved by humans intuitively, using mental imagery of the different planning steps. Here we suggest that the same approach can be used for robots, too, in cases which require only limited execution accuracy. In the current study, we propose a novel sub-symbolic method called Simulated Mental Imagery for Planning (SiMIP), which consists of perception, simulated action, success-checking and re-planning performed on 'imagined' images. We show that it is possible to implement mental imagery-based planning in an algorithmically sound way by combining regular convolutional neural networks and generative adversarial networks. With this method, the robot acquires the capability to use the initially existing scene to generate action plans without symbolic domain descriptions, while at the same time plans remain human-interpretable, different from deep reinforcement learning, which is an alternative sub-symbolic approach. We create a dataset from real scenes for a packing problem of having to correctly place different objects into different target slots. This way efficiency and success rate of this algorithm could be quantified.
Point cloud analysis (such as 3D segmentation and detection) is a challenging task, because of not only the irregular geometries of many millions of unordered points, but also the great variations caused by depth, viewpoint, occlusion, etc. Current studies put much focus on the adaption of neural networks to the complex geometries of point clouds, but are blind to a fundamental question: how to learn an appropriate point embedding space that is aware of both discriminative semantics and challenging variations? As a response, we propose a clustering based supervised learning scheme for point cloud analysis. Unlike current de-facto, scene-wise training paradigm, our algorithm conducts within-class clustering on the point embedding space for automatically discovering subclass patterns which are latent yet representative across scenes. The mined patterns are, in turn, used to repaint the embedding space, so as to respect the underlying distribution of the entire training dataset and improve the robustness to the variations. Our algorithm is principled and readily pluggable to modern point cloud segmentation networks during training, without extra overhead during testing. With various 3D network architectures (i.e., voxel-based, point-based, Transformer-based, automatically searched), our algorithm shows notable improvements on famous point cloud segmentation datasets (i.e.,2.0-2.6% on single-scan and 2.0-2.2% multi-scan of SemanticKITTI, 1.8-1.9% on S3DIS, in terms of mIoU). Our algorithm also demonstrates utility in 3D detection, showing 2.0-3.4% mAP gains on KITTI.
Correlation based stereo matching has achieved outstanding performance, which pursues cost volume between two feature maps. Unfortunately, current methods with a fixed model do not work uniformly well across various datasets, greatly limiting their real-world applicability. To tackle this issue, this paper proposes a new perspective to dynamically calculate correlation for robust stereo matching. A novel Uncertainty Guided Adaptive Correlation (UGAC) module is introduced to robustly adapt the same model for different scenarios. Specifically, a variance-based uncertainty estimation is employed to adaptively adjust the sampling area during warping operation. Additionally, we improve the traditional non-parametric warping with learnable parameters, such that the position-specific weights can be learned. We show that by empowering the recurrent network with the UGAC module, stereo matching can be exploited more robustly and effectively. Extensive experiments demonstrate that our method achieves state-of-the-art performance over the ETH3D, KITTI, and Middlebury datasets when employing the same fixed model over these datasets without any retraining procedure. To target real-time applications, we further design a lightweight model based on UGAC, which also outperforms other methods over KITTI benchmarks with only 0.6 M parameters.
Rehearsal, seeking to remind the model by storing old knowledge in lifelong learning, is one of the most effective ways to mitigate catastrophic forgetting, i.e., biased forgetting of previous knowledge when moving to new tasks. However, the old tasks of the most previous rehearsal-based methods suffer from the unpredictable domain shift when training the new task. This is because these methods always ignore two significant factors. First, the Data Imbalance between the new task and old tasks that makes the domain of old tasks prone to shift. Second, the Task Isolation among all tasks will make the domain shift toward unpredictable directions; To address the unpredictable domain shift, in this paper, we propose Multi-Domain Multi-Task (MDMT) rehearsal to train the old tasks and new task parallelly and equally to break the isolation among tasks. Specifically, a two-level angular margin loss is proposed to encourage the intra-class/task compactness and inter-class/task discrepancy, which keeps the model from domain chaos. In addition, to further address domain shift of the old tasks, we propose an optional episodic distillation loss on the memory to anchor the knowledge for each old task. Experiments on benchmark datasets validate the proposed approach can effectively mitigate the unpredictable domain shift.
Conventional methods for object detection typically require a substantial amount of training data and preparing such high-quality training data is very labor-intensive. In this paper, we propose a novel few-shot object detection network that aims at detecting objects of unseen categories with only a few annotated examples. Central to our method are our Attention-RPN, Multi-Relation Detector and Contrastive Training strategy, which exploit the similarity between the few shot support set and query set to detect novel objects while suppressing false detection in the background. To train our network, we contribute a new dataset that contains 1000 categories of various objects with high-quality annotations. To the best of our knowledge, this is one of the first datasets specifically designed for few-shot object detection. Once our few-shot network is trained, it can detect objects of unseen categories without further training or fine-tuning. Our method is general and has a wide range of potential applications. We produce a new state-of-the-art performance on different datasets in the few-shot setting. The dataset link is //github.com/fanq15/Few-Shot-Object-Detection-Dataset.
We consider the task of weakly supervised one-shot detection. In this task, we attempt to perform a detection task over a set of unseen classes, when training only using weak binary labels that indicate the existence of a class instance in a given example. The model is conditioned on a single exemplar of an unseen class and a target example that may or may not contain an instance of the same class as the exemplar. A similarity map is computed by using a Siamese neural network to map the exemplar and regions of the target example to a latent representation space and then computing cosine similarity scores between representations. An attention mechanism weights different regions in the target example, and enables learning of the one-shot detection task using the weaker labels alone. The model can be applied to detection tasks from different domains, including computer vision object detection. We evaluate our attention Siamese networks on a one-shot detection task from the audio domain, where it detects audio keywords in spoken utterances. Our model considerably outperforms a baseline approach and yields a 42.6% average precision for detection across 10 unseen classes. Moreover, architectural developments from computer vision object detection models such as a region proposal network can be incorporated into the model architecture, and results show that performance is expected to improve by doing so.
小貼士
登錄享
相關主題



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191