

The field of few-shot learning has recently seen substantial advancements. Most of these advancements came from casting few-shot learning as a meta-learning problem. Model Agnostic Meta Learning or MAML is currently one of the best approaches for few-shot learning via meta-learning. MAML is simple, elegant and very powerful, however, it has a variety of issues, such as being very sensitive to neural network architectures, often leading to instability during training, requiring arduous hyperparameter searches to stabilize training and achieve high generalization and being very computationally expensive at both training and inference times. In this paper, we propose various modifications to MAML that not only stabilize the system, but also substantially improve the generalization performance, convergence speed and computational overhead of MAML, which we call MAML++.
相關內容
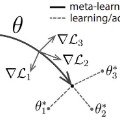
Model-agnostic meta-learners aim to acquire meta-learned parameters from similar tasks to adapt to novel tasks from the same distribution with few gradient updates. With the flexibility in the choice of models, those frameworks demonstrate appealing performance on a variety of domains such as few-shot image classification and reinforcement learning. However, one important limitation of such frameworks is that they seek a common initialization shared across the entire task distribution, substantially limiting the diversity of the task distributions that they are able to learn from. In this paper, we augment MAML with the capability to identify the mode of tasks sampled from a multimodal task distribution and adapt quickly through gradient updates. Specifically, we propose a multimodal MAML (MMAML) framework, which is able to modulate its meta-learned prior parameters according to the identified mode, allowing more efficient fast adaptation. We evaluate the proposed model on a diverse set of few-shot learning tasks, including regression, image classification, and reinforcement learning. The results not only demonstrate the effectiveness of our model in modulating the meta-learned prior in response to the characteristics of tasks but also show that training on a multimodal distribution can produce an improvement over unimodal training.
Language model pre-training, such as BERT, has significantly improved the performances of many natural language processing tasks. However, pre-trained language models are usually computationally expensive and memory intensive, so it is difficult to effectively execute them on some resource-restricted devices. To accelerate inference and reduce model size while maintaining accuracy, we firstly propose a novel transformer distillation method that is a specially designed knowledge distillation (KD) method for transformer-based models. By leveraging this new KD method, the plenty of knowledge encoded in a large teacher BERT can be well transferred to a small student TinyBERT. Moreover, we introduce a new two-stage learning framework for TinyBERT, which performs transformer distillation at both the pre-training and task-specific learning stages. This framework ensures that TinyBERT can capture both the general-domain and task-specific knowledge of the teacher BERT. TinyBERT is empirically effective and achieves comparable results with BERT in GLUE datasets, while being 7.5x smaller and 9.4x faster on inference. TinyBERT is also significantly better than state-of-the-art baselines, even with only about 28% parameters and 31% inference time of baselines.
A core capability of intelligent systems is the ability to quickly learn new tasks by drawing on prior experience. Gradient (or optimization) based meta-learning has recently emerged as an effective approach for few-shot learning. In this formulation, meta-parameters are learned in the outer loop, while task-specific models are learned in the inner-loop, by using only a small amount of data from the current task. A key challenge in scaling these approaches is the need to differentiate through the inner loop learning process, which can impose considerable computational and memory burdens. By drawing upon implicit differentiation, we develop the implicit MAML algorithm, which depends only on the solution to the inner level optimization and not the path taken by the inner loop optimizer. This effectively decouples the meta-gradient computation from the choice of inner loop optimizer. As a result, our approach is agnostic to the choice of inner loop optimizer and can gracefully handle many gradient steps without vanishing gradients or memory constraints. Theoretically, we prove that implicit MAML can compute accurate meta-gradients with a memory footprint that is, up to small constant factors, no more than that which is required to compute a single inner loop gradient and at no overall increase in the total computational cost. Experimentally, we show that these benefits of implicit MAML translate into empirical gains on few-shot image recognition benchmarks.
Bidirectional Encoder Representations from Transformers (BERT) represents the latest incarnation of pretrained language models which have recently advanced a wide range of natural language processing tasks. In this paper, we showcase how BERT can be usefully applied in text summarization and propose a general framework for both extractive and abstractive models. We introduce a novel document-level encoder based on BERT which is able to express the semantics of a document and obtain representations for its sentences. Our extractive model is built on top of this encoder by stacking several inter-sentence Transformer layers. For abstractive summarization, we propose a new fine-tuning schedule which adopts different optimizers for the encoder and the decoder as a means of alleviating the mismatch between the two (the former is pretrained while the latter is not). We also demonstrate that a two-staged fine-tuning approach can further boost the quality of the generated summaries. Experiments on three datasets show that our model achieves state-of-the-art results across the board in both extractive and abstractive settings. Our code is available at //github.com/nlpyang/PreSumm
Real-world applications often combine learning and optimization problems on graphs. For instance, our objective may be to cluster the graph in order to detect meaningful communities (or solve other common graph optimization problems such as facility location, maxcut, and so on). However, graphs or related attributes are often only partially observed, introducing learning problems such as link prediction which must be solved prior to optimization. We propose an approach to integrate a differentiable proxy for common graph optimization problems into training of machine learning models for tasks such as link prediction. This allows the model to focus specifically on the downstream task that its predictions will be used for. Experimental results show that our end-to-end system obtains better performance on example optimization tasks than can be obtained by combining state of the art link prediction methods with expert-designed graph optimization algorithms.
The goal of few-shot learning is to learn a classifier that generalizes well even when trained with a limited number of training instances per class. The recently introduced meta-learning approaches tackle this problem by learning a generic classifier across a large number of multiclass classification tasks and generalizing the model to a new task. Yet, even with such meta-learning, the low-data problem in the novel classification task still remains. In this paper, we propose Transductive Propagation Network (TPN), a novel meta-learning framework for transductive inference that classifies the entire test set at once to alleviate the low-data problem. Specifically, we propose to learn to propagate labels from labeled instances to unlabeled test instances, by learning a graph construction module that exploits the manifold structure in the data. TPN jointly learns both the parameters of feature embedding and the graph construction in an end-to-end manner. We validate TPN on multiple benchmark datasets, on which it largely outperforms existing few-shot learning approaches and achieves the state-of-the-art results.
Meta-learning, or learning to learn, is the science of systematically observing how different machine learning approaches perform on a wide range of learning tasks, and then learning from this experience, or meta-data, to learn new tasks much faster than otherwise possible. Not only does this dramatically speed up and improve the design of machine learning pipelines or neural architectures, it also allows us to replace hand-engineered algorithms with novel approaches learned in a data-driven way. In this chapter, we provide an overview of the state of the art in this fascinating and continuously evolving field.
We study the problem of video-to-video synthesis, whose goal is to learn a mapping function from an input source video (e.g., a sequence of semantic segmentation masks) to an output photorealistic video that precisely depicts the content of the source video. While its image counterpart, the image-to-image synthesis problem, is a popular topic, the video-to-video synthesis problem is less explored in the literature. Without understanding temporal dynamics, directly applying existing image synthesis approaches to an input video often results in temporally incoherent videos of low visual quality. In this paper, we propose a novel video-to-video synthesis approach under the generative adversarial learning framework. Through carefully-designed generator and discriminator architectures, coupled with a spatio-temporal adversarial objective, we achieve high-resolution, photorealistic, temporally coherent video results on a diverse set of input formats including segmentation masks, sketches, and poses. Experiments on multiple benchmarks show the advantage of our method compared to strong baselines. In particular, our model is capable of synthesizing 2K resolution videos of street scenes up to 30 seconds long, which significantly advances the state-of-the-art of video synthesis. Finally, we apply our approach to future video prediction, outperforming several state-of-the-art competing systems.
Model update lies at the heart of object tracking.Generally, model update is formulated as an online learning problem where a target model is learned over the online training dataset. Our key innovation is to \emph{learn the online learning algorithm itself using large number of offline videos}, i.e., \emph{learning to update}. The learned updater takes as input the online training dataset and outputs an updated target model. As a first attempt, we design the learned updater based on recurrent neural networks (RNNs) and demonstrate its application in a template-based tracker and a correlation filter-based tracker. Our learned updater consistently improves the base trackers and runs faster than realtime on GPU while requiring small memory footprint during testing. Experiments on standard benchmarks demonstrate that our learned updater outperforms commonly used update baselines including the efficient exponential moving average (EMA)-based update and the well-designed stochastic gradient descent (SGD)-based update. Equipped with our learned updater, the template-based tracker achieves state-of-the-art performance among realtime trackers on GPU.
Although reinforcement learning methods can achieve impressive results in simulation, the real world presents two major challenges: generating samples is exceedingly expensive, and unexpected perturbations can cause proficient but narrowly-learned policies to fail at test time. In this work, we propose to learn how to quickly and effectively adapt online to new situations as well as to perturbations. To enable sample-efficient meta-learning, we consider learning online adaptation in the context of model-based reinforcement learning. Our approach trains a global model such that, when combined with recent data, the model can be be rapidly adapted to the local context. Our experiments demonstrate that our approach can enable simulated agents to adapt their behavior online to novel terrains, to a crippled leg, and in highly-dynamic environments.




注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191