


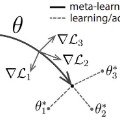
Model-agnostic meta-learners aim to acquire meta-learned parameters from similar tasks to adapt to novel tasks from the same distribution with few gradient updates. With the flexibility in the choice of models, those frameworks demonstrate appealing performance on a variety of domains such as few-shot image classification and reinforcement learning. However, one important limitation of such frameworks is that they seek a common initialization shared across the entire task distribution, substantially limiting the diversity of the task distributions that they are able to learn from. In this paper, we augment MAML with the capability to identify the mode of tasks sampled from a multimodal task distribution and adapt quickly through gradient updates. Specifically, we propose a multimodal MAML (MMAML) framework, which is able to modulate its meta-learned prior parameters according to the identified mode, allowing more efficient fast adaptation. We evaluate the proposed model on a diverse set of few-shot learning tasks, including regression, image classification, and reinforcement learning. The results not only demonstrate the effectiveness of our model in modulating the meta-learned prior in response to the characteristics of tasks but also show that training on a multimodal distribution can produce an improvement over unimodal training.
相關內容
Fashion is a complex social phenomenon. People follow fashion styles from demonstrations by experts or fashion icons. However, for machine agent, learning to imitate fashion experts from demonstrations can be challenging, especially for complex styles in environments with high-dimensional, multimodal observations. Most existing research regarding fashion outfit composition utilizes supervised learning methods to mimic the behaviors of style icons. These methods suffer from distribution shift: because the agent greedily imitates some given outfit demonstrations, it can drift away from one style to another styles given subtle differences. In this work, we propose an adversarial inverse reinforcement learning formulation to recover reward functions based on hierarchical multimodal representation (HM-AIRL) during the imitation process. The hierarchical joint representation can more comprehensively model the expert composited outfit demonstrations to recover the reward function. We demonstrate that the proposed HM-AIRL model is able to recover reward functions that are robust to changes in multimodal observations, enabling us to learn policies under significant variation between different styles.
Convolutional Neural Networks experience catastrophic forgetting when optimized on a sequence of learning problems: as they meet the objective of the current training examples, their performance on previous tasks drops drastically. In this work, we introduce a novel framework to tackle this problem with conditional computation. We equip each convolutional layer with task-specific gating modules, selecting which filters to apply on the given input. This way, we achieve two appealing properties. Firstly, the execution patterns of the gates allow to identify and protect important filters, ensuring no loss in the performance of the model for previously learned tasks. Secondly, by using a sparsity objective, we can promote the selection of a limited set of kernels, allowing to retain sufficient model capacity to digest new tasks.Existing solutions require, at test time, awareness of the task to which each example belongs to. This knowledge, however, may not be available in many practical scenarios. Therefore, we additionally introduce a task classifier that predicts the task label of each example, to deal with settings in which a task oracle is not available. We validate our proposal on four continual learning datasets. Results show that our model consistently outperforms existing methods both in the presence and the absence of a task oracle. Notably, on Split SVHN and Imagenet-50 datasets, our model yields up to 23.98% and 17.42% improvement in accuracy w.r.t. competing methods.
Fine-tuning a deep network trained with the standard cross-entropy loss is a strong baseline for few-shot learning. When fine-tuned transductively, this outperforms the current state-of-the-art on standard datasets such as Mini-ImageNet, Tiered-ImageNet, CIFAR-FS and FC-100 with the same hyper-parameters. The simplicity of this approach enables us to demonstrate the first few-shot learning results on the ImageNet-21k dataset. We find that using a large number of meta-training classes results in high few-shot accuracies even for a large number of few-shot classes. We do not advocate our approach as the solution for few-shot learning, but simply use the results to highlight limitations of current benchmarks and few-shot protocols. We perform extensive studies on benchmark datasets to propose a metric that quantifies the "hardness" of a few-shot episode. This metric can be used to report the performance of few-shot algorithms in a more systematic way.
We present a new method to learn video representations from large-scale unlabeled video data. Ideally, this representation will be generic and transferable, directly usable for new tasks such as action recognition and zero or few-shot learning. We formulate unsupervised representation learning as a multi-modal, multi-task learning problem, where the representations are shared across different modalities via distillation. Further, we introduce the concept of loss function evolution by using an evolutionary search algorithm to automatically find optimal combination of loss functions capturing many (self-supervised) tasks and modalities. Thirdly, we propose an unsupervised representation evaluation metric using distribution matching to a large unlabeled dataset as a prior constraint, based on Zipf's law. This unsupervised constraint, which is not guided by any labeling, produces similar results to weakly-supervised, task-specific ones. The proposed unsupervised representation learning results in a single RGB network and outperforms previous methods. Notably, it is also more effective than several label-based methods (e.g., ImageNet), with the exception of large, fully labeled video datasets.
The field of few-shot learning has recently seen substantial advancements. Most of these advancements came from casting few-shot learning as a meta-learning problem. Model Agnostic Meta Learning or MAML is currently one of the best approaches for few-shot learning via meta-learning. MAML is simple, elegant and very powerful, however, it has a variety of issues, such as being very sensitive to neural network architectures, often leading to instability during training, requiring arduous hyperparameter searches to stabilize training and achieve high generalization and being very computationally expensive at both training and inference times. In this paper, we propose various modifications to MAML that not only stabilize the system, but also substantially improve the generalization performance, convergence speed and computational overhead of MAML, which we call MAML++.
Meta-learning, or learning to learn, is the science of systematically observing how different machine learning approaches perform on a wide range of learning tasks, and then learning from this experience, or meta-data, to learn new tasks much faster than otherwise possible. Not only does this dramatically speed up and improve the design of machine learning pipelines or neural architectures, it also allows us to replace hand-engineered algorithms with novel approaches learned in a data-driven way. In this chapter, we provide an overview of the state of the art in this fascinating and continuously evolving field.
Meta-learning is a powerful tool that builds on multi-task learning to learn how to quickly adapt a model to new tasks. In the context of reinforcement learning, meta-learning algorithms can acquire reinforcement learning procedures to solve new problems more efficiently by meta-learning prior tasks. The performance of meta-learning algorithms critically depends on the tasks available for meta-training: in the same way that supervised learning algorithms generalize best to test points drawn from the same distribution as the training points, meta-learning methods generalize best to tasks from the same distribution as the meta-training tasks. In effect, meta-reinforcement learning offloads the design burden from algorithm design to task design. If we can automate the process of task design as well, we can devise a meta-learning algorithm that is truly automated. In this work, we take a step in this direction, proposing a family of unsupervised meta-learning algorithms for reinforcement learning. We describe a general recipe for unsupervised meta-reinforcement learning, and describe an effective instantiation of this approach based on a recently proposed unsupervised exploration technique and model-agnostic meta-learning. We also discuss practical and conceptual considerations for developing unsupervised meta-learning methods. Our experimental results demonstrate that unsupervised meta-reinforcement learning effectively acquires accelerated reinforcement learning procedures without the need for manual task design, significantly exceeds the performance of learning from scratch, and even matches performance of meta-learning methods that use hand-specified task distributions.
Although reinforcement learning methods can achieve impressive results in simulation, the real world presents two major challenges: generating samples is exceedingly expensive, and unexpected perturbations can cause proficient but narrowly-learned policies to fail at test time. In this work, we propose to learn how to quickly and effectively adapt online to new situations as well as to perturbations. To enable sample-efficient meta-learning, we consider learning online adaptation in the context of model-based reinforcement learning. Our approach trains a global model such that, when combined with recent data, the model can be be rapidly adapted to the local context. Our experiments demonstrate that our approach can enable simulated agents to adapt their behavior online to novel terrains, to a crippled leg, and in highly-dynamic environments.



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191