

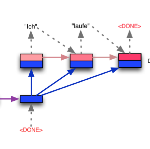
Ultra-fine entity typing plays a crucial role in information extraction by predicting fine-grained semantic types for entity mentions in text. However, this task poses significant challenges due to the massive number of entity types in the output space. The current state-of-the-art approaches, based on standard multi-label classifiers or cross-encoder models, suffer from poor generalization performance or inefficient inference. In this paper, we present CASENT, a seq2seq model designed for ultra-fine entity typing that predicts ultra-fine types with calibrated confidence scores. Our model takes an entity mention as input and employs constrained beam search to generate multiple types autoregressively. The raw sequence probabilities associated with the predicted types are then transformed into confidence scores using a novel calibration method. We conduct extensive experiments on the UFET dataset which contains over 10k types. Our method outperforms the previous state-of-the-art in terms of F1 score and calibration error, while achieving an inference speedup of over 50 times. Additionally, we demonstrate the generalization capabilities of our model by evaluating it in zero-shot and few-shot settings on five specialized domain entity typing datasets that are unseen during training. Remarkably, our model outperforms large language models with 10 times more parameters in the zero-shot setting, and when fine-tuned on 50 examples, it significantly outperforms ChatGPT on all datasets. Our code, models and demo are available at //github.com/yanlinf/CASENT.
相關內容
SAM-Assisted Remote Sensing Imagery Semantic Segmentation with Object and Boundary Constraints
Semantic segmentation of remote sensing imagery plays a pivotal role in extracting precise information for diverse down-stream applications. Recent development of the Segment Anything Model (SAM), an advanced general-purpose segmentation model, has revolutionized this field, presenting new avenues for accurate and efficient segmentation. However, SAM is limited to generating segmentation results without class information. Consequently, the utilization of such a powerful general vision model for semantic segmentation in remote sensing images has become a focal point of research. In this paper, we present a streamlined framework aimed at leveraging the raw output of SAM by exploiting two novel concepts called SAM-Generated Object (SGO) and SAM-Generated Boundary (SGB). More specifically, we propose a novel object loss and further introduce a boundary loss as augmentative components to aid in model optimization in a general semantic segmentation framework. Taking into account the content characteristics of SGO, we introduce the concept of object consistency to leverage segmented regions lacking semantic information. By imposing constraints on the consistency of predicted values within objects, the object loss aims to enhance semantic segmentation performance. Furthermore, the boundary loss capitalizes on the distinctive features of SGB by directing the model's attention to the boundary information of the object. Experimental results on two well-known datasets, namely ISPRS Vaihingen and LoveDA Urban, demonstrate the effectiveness of our proposed method. The source code for this work will be accessible at //github.com/sstary/SSRS.
Multi-talker overlapped speech recognition remains a significant challenge, requiring not only speech recognition but also speaker diarization tasks to be addressed. In this paper, to better address these tasks, we first introduce speaker labels into an autoregressive transformer-based speech recognition model to support multi-speaker overlapped speech recognition. Then, to improve speaker diarization, we propose a novel speaker mask branch to detection the speech segments of individual speakers. With the proposed model, we can perform both speech recognition and speaker diarization tasks simultaneously using a single model. Experimental results on the LibriSpeech-based overlapped dataset demonstrate the effectiveness of the proposed method in both speech recognition and speaker diarization tasks, particularly enhancing the accuracy of speaker diarization in relatively complex multi-talker scenarios.
Multistream classification poses significant challenges due to the necessity for rapid adaptation in dynamic streaming processes with concept drift. Despite the growing research outcomes in this area, there has been a notable oversight regarding the temporal dynamic relationships between these streams, leading to the issue of negative transfer arising from irrelevant data. In this paper, we propose a novel Online Boosting Adaptive Learning (OBAL) method that effectively addresses this limitation by adaptively learning the dynamic correlation among different streams. Specifically, OBAL operates in a dual-phase mechanism, in the first of which we design an Adaptive COvariate Shift Adaptation (AdaCOSA) algorithm to construct an initialized ensemble model using archived data from various source streams, thus mitigating the covariate shift while learning the dynamic correlations via an adaptive re-weighting strategy. During the online process, we employ a Gaussian Mixture Model-based weighting mechanism, which is seamlessly integrated with the acquired correlations via AdaCOSA to effectively handle asynchronous drift. This approach significantly improves the predictive performance and stability of the target stream. We conduct comprehensive experiments on several synthetic and real-world data streams, encompassing various drifting scenarios and types. The results clearly demonstrate that OBAL achieves remarkable advancements in addressing multistream classification problems by effectively leveraging positive knowledge derived from multiple sources.
Open-loop stable limit cycles are foundational to the dynamics of legged robots. They impart a self-stabilizing character to the robot's gait, thus alleviating the need for compute-heavy feedback-based gait correction. This paper proposes a general approach to rapidly generate limit cycles with explicit stability constraints for a given dynamical system. In particular, we pose the problem of open-loop limit cycle stability as a single-stage constrained-optimization problem (COP), and use Direct Collocation to transcribe it into a nonlinear program (NLP) with closed-form expressions for constraints, objectives, and their gradients. The COP formulations of stability are developed based (1) on the spectral radius of a discrete return map, and (2) on the spectral radius of the system's monodromy matrix, where the spectral radius is bounded using different constraint-satisfaction formulations of the eigenvalue problem. We compare the performance and solution qualities of each approach, but specifically highlight the Schur decomposition of the monodromy matrix as a formulation which boasts wider applicability through weaker assumptions and attractive numerical convergence properties. Moreover, we present results from our experiments on a spring-loaded inverted pendulum model of a robot, where our method generated actuation trajectories for open-loop stable hopping in under 2 seconds (on the Intel Core i7-6700K), and produced energy-minimizing actuation trajectories even under tight stability constraints.
Completely Automated Public Turing Test To Tell Computers and Humans Apart (CAPTCHA) is a type of challenge-response test widely used in authentication systems. A well-known challenge it faces is the CAPTCHA farm, where workers are hired to solve CAPTCHAs manually. In this work, we propose to tackle this challenge from a novel perspective, converting CAPTCHA farm detection to identity inconsistency detection, which essentially becomes an authentication process. Specifically, we develop a novel embedding model, which measures the similarity between mouse trajectories collected during the session and when registering/solving CAPTCHA, to authenticate and detect identity inconsistency. Moreover, unlike most existing works that employ a separate mouse movement classifier for each individual user, which brings in considerable costs when serving a large number of users, our model performs detection tasks using only one classifier for all users, significantly reducing the cost. Experiment results validate the superiority of our method over the state-of-the-art time series classification methods, achieving 94.3% and 97.7% of AUC in identity and authentication inconsistency detection, respectively.
Ensembles over neural network weights trained from different random initialization, known as deep ensembles, achieve state-of-the-art accuracy and calibration. The recently introduced batch ensembles provide a drop-in replacement that is more parameter efficient. In this paper, we design ensembles not only over weights, but over hyperparameters to improve the state of the art in both settings. For best performance independent of budget, we propose hyper-deep ensembles, a simple procedure that involves a random search over different hyperparameters, themselves stratified across multiple random initializations. Its strong performance highlights the benefit of combining models with both weight and hyperparameter diversity. We further propose a parameter efficient version, hyper-batch ensembles, which builds on the layer structure of batch ensembles and self-tuning networks. The computational and memory costs of our method are notably lower than typical ensembles. On image classification tasks, with MLP, LeNet, and Wide ResNet 28-10 architectures, our methodology improves upon both deep and batch ensembles.
Conventional methods for object detection typically require a substantial amount of training data and preparing such high-quality training data is very labor-intensive. In this paper, we propose a novel few-shot object detection network that aims at detecting objects of unseen categories with only a few annotated examples. Central to our method are our Attention-RPN, Multi-Relation Detector and Contrastive Training strategy, which exploit the similarity between the few shot support set and query set to detect novel objects while suppressing false detection in the background. To train our network, we contribute a new dataset that contains 1000 categories of various objects with high-quality annotations. To the best of our knowledge, this is one of the first datasets specifically designed for few-shot object detection. Once our few-shot network is trained, it can detect objects of unseen categories without further training or fine-tuning. Our method is general and has a wide range of potential applications. We produce a new state-of-the-art performance on different datasets in the few-shot setting. The dataset link is //github.com/fanq15/Few-Shot-Object-Detection-Dataset.
Knowledge graph completion aims to predict missing relations between entities in a knowledge graph. While many different methods have been proposed, there is a lack of a unifying framework that would lead to state-of-the-art results. Here we develop PathCon, a knowledge graph completion method that harnesses four novel insights to outperform existing methods. PathCon predicts relations between a pair of entities by: (1) Considering the Relational Context of each entity by capturing the relation types adjacent to the entity and modeled through a novel edge-based message passing scheme; (2) Considering the Relational Paths capturing all paths between the two entities; And, (3) adaptively integrating the Relational Context and Relational Path through a learnable attention mechanism. Importantly, (4) in contrast to conventional node-based representations, PathCon represents context and path only using the relation types, which makes it applicable in an inductive setting. Experimental results on knowledge graph benchmarks as well as our newly proposed dataset show that PathCon outperforms state-of-the-art knowledge graph completion methods by a large margin. Finally, PathCon is able to provide interpretable explanations by identifying relations that provide the context and paths that are important for a given predicted relation.
Automatic KB completion for commonsense knowledge graphs (e.g., ATOMIC and ConceptNet) poses unique challenges compared to the much studied conventional knowledge bases (e.g., Freebase). Commonsense knowledge graphs use free-form text to represent nodes, resulting in orders of magnitude more nodes compared to conventional KBs (18x more nodes in ATOMIC compared to Freebase (FB15K-237)). Importantly, this implies significantly sparser graph structures - a major challenge for existing KB completion methods that assume densely connected graphs over a relatively smaller set of nodes. In this paper, we present novel KB completion models that can address these challenges by exploiting the structural and semantic context of nodes. Specifically, we investigate two key ideas: (1) learning from local graph structure, using graph convolutional networks and automatic graph densification and (2) transfer learning from pre-trained language models to knowledge graphs for enhanced contextual representation of knowledge. We describe our method to incorporate information from both these sources in a joint model and provide the first empirical results for KB completion on ATOMIC and evaluation with ranking metrics on ConceptNet. Our results demonstrate the effectiveness of language model representations in boosting link prediction performance and the advantages of learning from local graph structure (+1.5 points in MRR for ConceptNet) when training on subgraphs for computational efficiency. Further analysis on model predictions shines light on the types of commonsense knowledge that language models capture well.
Object tracking is challenging as target objects often undergo drastic appearance changes over time. Recently, adaptive correlation filters have been successfully applied to object tracking. However, tracking algorithms relying on highly adaptive correlation filters are prone to drift due to noisy updates. Moreover, as these algorithms do not maintain long-term memory of target appearance, they cannot recover from tracking failures caused by heavy occlusion or target disappearance in the camera view. In this paper, we propose to learn multiple adaptive correlation filters with both long-term and short-term memory of target appearance for robust object tracking. First, we learn a kernelized correlation filter with an aggressive learning rate for locating target objects precisely. We take into account the appropriate size of surrounding context and the feature representations. Second, we learn a correlation filter over a feature pyramid centered at the estimated target position for predicting scale changes. Third, we learn a complementary correlation filter with a conservative learning rate to maintain long-term memory of target appearance. We use the output responses of this long-term filter to determine if tracking failure occurs. In the case of tracking failures, we apply an incrementally learned detector to recover the target position in a sliding window fashion. Extensive experimental results on large-scale benchmark datasets demonstrate that the proposed algorithm performs favorably against the state-of-the-art methods in terms of efficiency, accuracy, and robustness.
小貼士
登錄享


注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191