

Annotation of multimedia data by humans is time-consuming and costly, while reliable automatic generation of semantic metadata is a major challenge. We propose a framework to extract semantic metadata from automatically generated video captions. As metadata, we consider entities, the entities' properties, relations between entities, and the video category. We employ two state-of-the-art dense video captioning models with masked transformer (MT) and parallel decoding (PVDC) to generate captions for videos of the ActivityNet Captions dataset. Our experiments show that it is possible to extract entities, their properties, relations between entities, and the video category from the generated captions. We observe that the quality of the extracted information is mainly influenced by the quality of the event localization in the video as well as the performance of the event caption generation.
相關內容
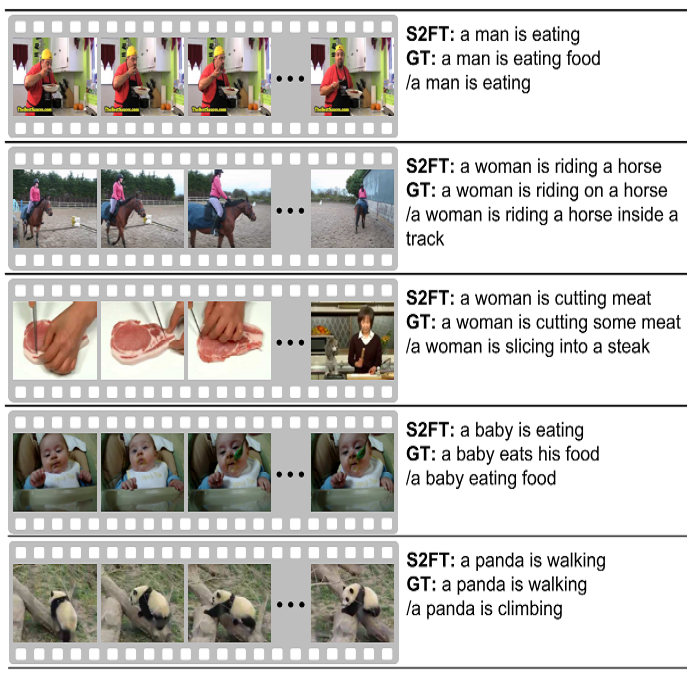
視(shi)頻描述生(sheng)成(cheng)(Video Caption),就是從視(shi)頻中(zhong)自(zi)動生(sheng)成(cheng)一段(duan)描述性文字
Emerging applications of robotics, and concerns about their impact, require the research community to put human-centric objectives front-and-center. To meet this challenge, we advocate an interdisciplinary approach, socially cognizant robotics, which synthesizes technical and social science methods. We argue that this approach follows from the need to empower stakeholder participation (from synchronous human feedback to asynchronous societal assessment) in shaping AI-driven robot behavior at all levels, and leads to a range of novel research perspectives and problems both for improving robots' interactions with individuals and impacts on society. Drawing on these arguments, we develop best practices for socially cognizant robot design that balance traditional technology-based metrics (e.g. efficiency, precision and accuracy) with critically important, albeit challenging to measure, human and society-based metrics.
A Risk Management Perspective on Statistical Estimation and Generalized Variational Inference
Generalized variational inference (GVI) provides an optimization-theoretic framework for statistical estimation that encapsulates many traditional estimation procedures. The typical GVI problem is to compute a distribution of parameters that maximizes the expected payoff minus the divergence of the distribution from a specified prior. In this way, GVI enables likelihood-free estimation with the ability to control the influence of the prior by tuning the so-called learning rate. Recently, GVI was shown to outperform traditional Bayesian inference when the model and prior distribution are misspecified. In this paper, we introduce and analyze a new GVI formulation based on utility theory and risk management. Our formulation is to maximize the expected payoff while enforcing constraints on the maximizing distribution. We recover the original GVI distribution by choosing the feasible set to include a constraint on the divergence of the distribution from the prior. In doing so, we automatically determine the learning rate as the Lagrange multiplier for the constraint. In this setting, we are able to transform the infinite-dimensional estimation problem into a two-dimensional convex program. This reformulation further provides an analytic expression for the optimal density of parameters. In addition, we prove asymptotic consistency results for empirical approximations of our optimal distributions. Throughout, we draw connections between our estimation procedure and risk management. In fact, we demonstrate that our estimation procedure is equivalent to evaluating a risk measure. We test our procedure on an estimation problem with a misspecified model and prior distribution, and conclude with some extensions of our approach.
We study the problem of determining the emergent behaviors that are possible given a functionally heterogeneous swarm of robots with limited capabilities. Prior work has considered behavior search for homogeneous swarms and proposed the use of novelty search over either a hand-specified or learned behavior space followed by clustering to return a taxonomy of emergent behaviors to the user. In this paper, we seek to better understand the role of novelty search and the efficacy of using clustering to discover novel emergent behaviors. Through a large set of experiments and ablations, we analyze the effect of representations, evolutionary search, and various clustering methods in the search for novel behaviors in a heterogeneous swarm. Our results indicate that prior methods fail to discover many interesting behaviors and that an iterative human-in-the-loop discovery process discovers more behaviors than random search, swarm chemistry, and automated behavior discovery. The combined discoveries of our experiments uncover 23 emergent behaviors, 18 of which are novel discoveries. To the best of our knowledge, these are the first known emergent behaviors for heterogeneous swarms of computation-free agents. Videos, code, and appendix are available at the project website: //sites.google.com/view/heterogeneous-bd-methods
Path reasoning methods over knowledge graphs have gained popularity for their potential to improve transparency in recommender systems. However, the resulting models still rely on pre-trained knowledge graph embeddings, fail to fully exploit the interdependence between entities and relations in the KG for recommendation, and may generate inaccurate explanations. In this paper, we introduce PEARLM, a novel approach that efficiently captures user behaviour and product-side knowledge through language modelling. With our approach, knowledge graph embeddings are directly learned from paths over the KG by the language model, which also unifies entities and relations in the same optimisation space. Constraints on the sequence decoding additionally guarantee path faithfulness with respect to the KG. Experiments on two datasets show the effectiveness of our approach compared to state-of-the-art baselines. Source code and datasets: AVAILABLE AFTER GETTING ACCEPTED.
This paper presents novel methodologies for conducting practical differentially private (DP) estimation and inference in high-dimensional linear regression. We start by proposing a differentially private Bayesian Information Criterion (BIC) for selecting the unknown sparsity parameter in DP-Lasso, eliminating the need for prior knowledge of model sparsity, a requisite in the existing literature. Then we propose a differentially private debiased LASSO algorithm that enables privacy-preserving inference on regression parameters. Our proposed method enables accurate and private inference on the regression parameters by leveraging the inherent sparsity of high-dimensional linear regression models. Additionally, we address the issue of multiple testing in high-dimensional linear regression by introducing a differentially private multiple testing procedure that controls the false discovery rate (FDR). This allows for accurate and privacy-preserving identification of significant predictors in the regression model. Through extensive simulations and real data analysis, we demonstrate the efficacy of our proposed methods in conducting inference for high-dimensional linear models while safeguarding privacy and controlling the FDR.
Recent contrastive representation learning methods rely on estimating mutual information (MI) between multiple views of an underlying context. E.g., we can derive multiple views of a given image by applying data augmentation, or we can split a sequence into views comprising the past and future of some step in the sequence. Contrastive lower bounds on MI are easy to optimize, but have a strong underestimation bias when estimating large amounts of MI. We propose decomposing the full MI estimation problem into a sum of smaller estimation problems by splitting one of the views into progressively more informed subviews and by applying the chain rule on MI between the decomposed views. This expression contains a sum of unconditional and conditional MI terms, each measuring modest chunks of the total MI, which facilitates approximation via contrastive bounds. To maximize the sum, we formulate a contrastive lower bound on the conditional MI which can be approximated efficiently. We refer to our general approach as Decomposed Estimation of Mutual Information (DEMI). We show that DEMI can capture a larger amount of MI than standard non-decomposed contrastive bounds in a synthetic setting, and learns better representations in a vision domain and for dialogue generation.
Graph Neural Networks (GNNs) have received considerable attention on graph-structured data learning for a wide variety of tasks. The well-designed propagation mechanism which has been demonstrated effective is the most fundamental part of GNNs. Although most of GNNs basically follow a message passing manner, litter effort has been made to discover and analyze their essential relations. In this paper, we establish a surprising connection between different propagation mechanisms with a unified optimization problem, showing that despite the proliferation of various GNNs, in fact, their proposed propagation mechanisms are the optimal solution optimizing a feature fitting function over a wide class of graph kernels with a graph regularization term. Our proposed unified optimization framework, summarizing the commonalities between several of the most representative GNNs, not only provides a macroscopic view on surveying the relations between different GNNs, but also further opens up new opportunities for flexibly designing new GNNs. With the proposed framework, we discover that existing works usually utilize naive graph convolutional kernels for feature fitting function, and we further develop two novel objective functions considering adjustable graph kernels showing low-pass or high-pass filtering capabilities respectively. Moreover, we provide the convergence proofs and expressive power comparisons for the proposed models. Extensive experiments on benchmark datasets clearly show that the proposed GNNs not only outperform the state-of-the-art methods but also have good ability to alleviate over-smoothing, and further verify the feasibility for designing GNNs with our unified optimization framework.
Graph neural networks (GNNs) are a popular class of machine learning models whose major advantage is their ability to incorporate a sparse and discrete dependency structure between data points. Unfortunately, GNNs can only be used when such a graph-structure is available. In practice, however, real-world graphs are often noisy and incomplete or might not be available at all. With this work, we propose to jointly learn the graph structure and the parameters of graph convolutional networks (GCNs) by approximately solving a bilevel program that learns a discrete probability distribution on the edges of the graph. This allows one to apply GCNs not only in scenarios where the given graph is incomplete or corrupted but also in those where a graph is not available. We conduct a series of experiments that analyze the behavior of the proposed method and demonstrate that it outperforms related methods by a significant margin.
We introduce a multi-task setup of identifying and classifying entities, relations, and coreference clusters in scientific articles. We create SciERC, a dataset that includes annotations for all three tasks and develop a unified framework called Scientific Information Extractor (SciIE) for with shared span representations. The multi-task setup reduces cascading errors between tasks and leverages cross-sentence relations through coreference links. Experiments show that our multi-task model outperforms previous models in scientific information extraction without using any domain-specific features. We further show that the framework supports construction of a scientific knowledge graph, which we use to analyze information in scientific literature.
Detecting carried objects is one of the requirements for developing systems to reason about activities involving people and objects. We present an approach to detect carried objects from a single video frame with a novel method that incorporates features from multiple scales. Initially, a foreground mask in a video frame is segmented into multi-scale superpixels. Then the human-like regions in the segmented area are identified by matching a set of extracted features from superpixels against learned features in a codebook. A carried object probability map is generated using the complement of the matching probabilities of superpixels to human-like regions and background information. A group of superpixels with high carried object probability and strong edge support is then merged to obtain the shape of the carried object. We applied our method to two challenging datasets, and results show that our method is competitive with or better than the state-of-the-art.
小貼士
登錄享

注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191