

The increasing installation rate of wind power poses great challenges to the global power system. In order to ensure the reliable operation of the power system, it is necessary to accurately forecast the wind speed and power of the wind turbines. At present, deep learning is progressively applied to the wind speed prediction. Nevertheless, the recent deep learning methods still reflect the embarrassment for practical applications due to model interpretability and hardware limitation. To this end, a novel deep knowledge-based learning method is proposed in this paper. The proposed method hybridizes pre-training method and auto-encoder structure to improve data representation and modeling of the deep knowledge-based learning framework. In order to form knowledge and corresponding absorbers, the original data is preprocessed by an optimization model based on correlation to construct multi-layer networks (knowledge) which are absorbed by sequence to sequence (Seq2Seq) models. Specifically, new cognition and memory units (CMU) are designed to reinforce traditional deep learning framework. Finally, the effectiveness of the proposed method is verified by three wind prediction cases from a wind farm in Liaoning, China. Experimental results show that the proposed method increases the stability and training efficiency compared to the traditional LSTM method and LSTM/GRU-based Seq2Seq method for applications of wind speed forecasting.
相關內容
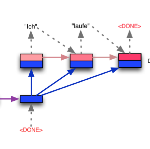
The recently rising markup-to-image generation poses greater challenges as compared to natural image generation, due to its low tolerance for errors as well as the complex sequence and context correlations between markup and rendered image. This paper proposes a novel model named "Contrast-augmented Diffusion Model with Fine-grained Sequence Alignment" (FSA-CDM), which introduces contrastive positive/negative samples into the diffusion model to boost performance for markup-to-image generation. Technically, we design a fine-grained cross-modal alignment module to well explore the sequence similarity between the two modalities for learning robust feature representations. To improve the generalization ability, we propose a contrast-augmented diffusion model to explicitly explore positive and negative samples by maximizing a novel contrastive variational objective, which is mathematically inferred to provide a tighter bound for the model's optimization. Moreover, the context-aware cross attention module is developed to capture the contextual information within markup language during the denoising process, yielding better noise prediction results. Extensive experiments are conducted on four benchmark datasets from different domains, and the experimental results demonstrate the effectiveness of the proposed components in FSA-CDM, significantly exceeding state-of-the-art performance by about 2%-12% DTW improvements. The code will be released at //github.com/zgj77/FSACDM.
Two-sided platforms rely on their recommendation algorithms to help visitors successfully find a match. However, on platforms such as VolunteerMatch (VM) -- which has facilitated millions of connections between volunteers and nonprofits -- a sizable fraction of website traffic arrives directly to a nonprofit's volunteering page via an external link, thus bypassing the platform's recommendation algorithm. We study how such platforms should account for this external traffic in the design of their recommendation algorithms, given the goal of maximizing successful matches. We model the platform's problem as a special case of online matching, where (using VM terminology) volunteers arrive sequentially and probabilistically match with one opportunity, each of which has finite need for volunteers. In our framework, external traffic is interested only in their targeted opportunity; by contrast, internal traffic may be interested in many opportunities, and the platform's online algorithm selects which opportunity to recommend. In evaluating different algorithms, we parameterize the competitive ratio based on the amount of external traffic. After demonstrating the shortcomings of a commonly-used algorithm that is optimal in the absence of external traffic, we propose a new algorithm -- Adaptive Capacity (AC) -- which accounts for matches differently based on whether they originate from internal or external traffic. We provide a lower bound on AC's competitive ratio that is increasing in the amount of external traffic and that is close to (and, in some regimes, exactly matches) the parameterized upper bound we establish on the competitive ratio of any online algorithm. We complement our theoretical results with a numerical study motivated by VM data that demonstrates the strong performance of AC and furthers our understanding of the difference between AC and other commonly-used algorithms.
Accurate online transient stability prediction is critical for ensuring power system stability when facing disturbances. While traditional transient stablity analysis replies on the time domain simulations can not be quickly adapted to the power grid toplogy change. In order to vectorize high-dimensional power grid topological structure information into low-dimensional node-based graph embedding streaming data, graph embedding dynamic feature (GEDF) has been proposed. The transient stability GEDF-based supervised contrastive learning (GEDF-SCL) model uses supervised contrastive learning to predict transient stability with GEDFs, considering power grid topology information. To evaluate the performance of the proposed GEDF-SCL model, power grids of varying topologies were generated based on the IEEE 39-bus system model. Transient operational data was obtained by simulating N-1 and N-$\bm{m}$-1 contingencies on these generated power system topologies. Test result demonstrated that the GEDF-SCL model can achieve high accuracy in transient stability prediction and adapt well to changing power grid topologies.
Weakly-supervised temporal action localization (WTAL) is a practical yet challenging task. Due to large-scale datasets, most existing methods use a network pretrained in other datasets to extract features, which are not suitable enough for WTAL. To address this problem, researchers design several modules for feature enhancement, which improve the performance of the localization module, especially modeling the temporal relationship between snippets. However, all of them neglect the adverse effects of ambiguous information, which would reduce the discriminability of others. Considering this phenomenon, we propose Discriminability-Driven Graph Network (DDG-Net), which explicitly models ambiguous snippets and discriminative snippets with well-designed connections, preventing the transmission of ambiguous information and enhancing the discriminability of snippet-level representations. Additionally, we propose feature consistency loss to prevent the assimilation of features and drive the graph convolution network to generate more discriminative representations. Extensive experiments on THUMOS14 and ActivityNet1.2 benchmarks demonstrate the effectiveness of DDG-Net, establishing new state-of-the-art results on both datasets. Source code is available at \url{//github.com/XiaojunTang22/ICCV2023-DDGNet}.
RDMA has been widely adopted for high-speed datacenter networks. However, native RDMA merely supports one-to-one reliable connection, which mismatches various applications with group communication patterns (e.g., one-to-many). While there are some multicast enhancements to address it, they all fail to simultaneously achieve optimal multicast forwarding and fully unleash the distinguished RDMA capabilities. In this paper, we present Gleam, an RDMA-accelerated multicast protocol that simultaneously supports optimal multicast forwarding, efficient utilization of the prominent RDMA capabilities, and compatibility with the commodity RNICs. At its core, Gleam re-purposes the existing RDMA RC logic with careful switch coordination as an efficient multicast transport. Gleam performs the one-to-many connection maintenance and many-to-one feedback aggregation, based on an extended multicast forwarding table structure, to achieve integration between standard RC logic and in-fabric multicast. We implement a fully functional Gleam prototype. With extensive testbed experiments and simulations, we demonstrate Gleam's significant improvement in accelerating multicast communication of realistic applications. For instance, Gleam achieves 2.9X lower communication time of an HPC benchmark application and 2.7X higher data replication throughput.
Robotic navigation in unknown, cluttered environments with limited sensing capabilities poses significant challenges in robotics. Local trajectory optimization methods, such as Model Predictive Path Intergal (MPPI), are a promising solution to this challenge. However, global guidance is required to ensure effective navigation, especially when encountering challenging environmental conditions or navigating beyond the planning horizon. This study presents the GP-MPPI, an online learning-based control strategy that integrates MPPI with a local perception model based on Sparse Gaussian Process (SGP). The key idea is to leverage the learning capability of SGP to construct a variance (uncertainty) surface, which enables the robot to learn about the navigable space surrounding it, identify a set of suggested subgoals, and ultimately recommend the optimal subgoal that minimizes a predefined cost function to the local MPPI planner. Afterward, MPPI computes the optimal control sequence that satisfies the robot and collision avoidance constraints. Such an approach eliminates the necessity of a global map of the environment or an offline training process. We validate the efficiency and robustness of our proposed control strategy through both simulated and real-world experiments of 2D autonomous navigation tasks in complex unknown environments, demonstrating its superiority in guiding the robot safely towards its desired goal while avoiding obstacles and escaping entrapment in local minima. The GPU implementation of GP-MPPI, including the supplementary video, is available at //github.com/IhabMohamed/GP-MPPI.
In a wind farm turbines convert wind energy into electrical energy. The generation of each turbine is transmitted, possibly via other turbines, to a substation that is connected to the power grid. On every possible interconnection there can be at most one of various different cable types. Each type comes with a cost per unit length and with a capacity. Designing a cost-minimal cable layout for a wind farm to feed all turbine production into the power grid is called the Wind Farm Cabling Problem (WCP). We consider a formulation of WCP as a flow problem on a graph where the cost of a flow on an edge is modeled by a step function originating from the cable types. Recently, we presented a proof-of-concept for a negative cycle canceling-based algorithm for WCP [14]. We extend key steps of that heuristic and build a theoretical foundation that explains how this heuristic tackles the problems arising from the special structure of WCP. A thorough experimental evaluation identifies the best setup of the algorithm and compares it to existing methods from the literature such as Mixed-integer Linear Programming (MILP) and Simulated Annealing (SA). The heuristic runs in a range of half a millisecond to approximately one and a half minutes on instances with up to 500 turbines. It provides solutions of similar quality compared to both competitors with running times of one hour and one day. When comparing the solution quality after a running time of two seconds, our algorithm outperforms the MILP- and SA-approaches, which allows it to be applied in interactive wind farm planning.
Reconfigurable intelligent surfaces (RISs) allow controlling the propagation environment in wireless networks through reconfigurable elements. Recently, beyond diagonal RISs (BD-RISs) have been proposed as novel RIS architectures whose scattering matrix is not limited to being diagonal. However, BDRISs have been studied assuming continuous-value scattering matrices, which are hard to implement in practice. In this paper, we address this problem by proposing two solutions to realize discrete-value group and fully connected RISs. First, we propose scalar-discrete RISs, in which each entry of the RIS impedance matrix is independently discretized. Second, we propose vector-discrete RISs, where the entries in each group of the RIS impedance matrix are jointly discretized. In both solutions, the codebook is designed offline such as to minimize the distortion caused in the RIS impedance matrix by the discretization operation. Numerical results show that vector-discrete RISs achieve higher performance than scalar discrete RISs at the cost of increased optimization complexity. Furthermore, fewer resolution bits per impedance are necessary to achieve the performance upper bound as the group size of the group connected architecture increases. In particular, only a single resolution bit is sufficient in fully connected RISs to approximately achieve the performance upper bound.
With the rise of powerful pre-trained vision-language models like CLIP, it becomes essential to investigate ways to adapt these models to downstream datasets. A recently proposed method named Context Optimization (CoOp) introduces the concept of prompt learning -- a recent trend in NLP -- to the vision domain for adapting pre-trained vision-language models. Specifically, CoOp turns context words in a prompt into a set of learnable vectors and, with only a few labeled images for learning, can achieve huge improvements over intensively-tuned manual prompts. In our study we identify a critical problem of CoOp: the learned context is not generalizable to wider unseen classes within the same dataset, suggesting that CoOp overfits base classes observed during training. To address the problem, we propose Conditional Context Optimization (CoCoOp), which extends CoOp by further learning a lightweight neural network to generate for each image an input-conditional token (vector). Compared to CoOp's static prompts, our dynamic prompts adapt to each instance and are thus less sensitive to class shift. Extensive experiments show that CoCoOp generalizes much better than CoOp to unseen classes, even showing promising transferability beyond a single dataset; and yields stronger domain generalization performance as well. Code is available at //github.com/KaiyangZhou/CoOp.
Effective multi-robot teams require the ability to move to goals in complex environments in order to address real-world applications such as search and rescue. Multi-robot teams should be able to operate in a completely decentralized manner, with individual robot team members being capable of acting without explicit communication between neighbors. In this paper, we propose a novel game theoretic model that enables decentralized and communication-free navigation to a goal position. Robots each play their own distributed game by estimating the behavior of their local teammates in order to identify behaviors that move them in the direction of the goal, while also avoiding obstacles and maintaining team cohesion without collisions. We prove theoretically that generated actions approach a Nash equilibrium, which also corresponds to an optimal strategy identified for each robot. We show through extensive simulations that our approach enables decentralized and communication-free navigation by a multi-robot system to a goal position, and is able to avoid obstacles and collisions, maintain connectivity, and respond robustly to sensor noise.
小貼士
登錄享



注冊地址: 北京市海淀區羊坊店路18號2幢3層301-191